这是笔者在准备nju推免机试时准备的自用资料,但是估计从今年(2025)过后不会再有这类型的机器学习算法题目了,可以作为学习西瓜书的一些参考(应该有不少谬误及typo)
常见损失函数
1. Mean Squared Error (MSE)
均方误差 (MSE) 用于回归任务,衡量预测值与真实值之间的平均平方差。
数学公式:
- $y_{\text{true}}^i $是第 ( i ) 个样本的真实值。
- $ y_{\text{pred}}^i$ 是第 ( i ) 个样本的预测值。
- ( N ) 是样本总数。
2. Mean Absolute Error (MAE)
平均绝对误差 (MAE) 用于回归任务,衡量预测值与真实值之间的平均绝对差。
数学公式:
- $ y_{\text{true}}^i $ 是第 ( i ) 个样本的真实值。
- $ y_{\text{pred}}^i $ 是第 ( i ) 个样本的预测值。
3. Binary Cross-Entropy
二分类交叉熵用于二分类任务,衡量模型预测的概率与真实标签之间的差异。
数学公式:
- ( $y_{\text{true}}^i \in \{0, 1\}$ ) 是第 ( i ) 个样本的真实标签。
- ( $y_{\text{pred}}^i $) 是第 ( i ) 个样本的预测概率。
4. Categorical Cross-Entropy
多分类交叉熵用于多分类任务,衡量模型预测的概率分布与真实标签的分布之间的差异。
数学公式:
- ( $y_{\text{true},c}^i \in \{0, 1\}$ ) 是第 ( i ) 个样本的真实标签的 one-hot 编码。
- ( $y_{\text{pred},c}^i $) 是第 ( i ) 个样本属于类别 ( c ) 的预测概率。
- ( C ) 是类别的总数。
5. Hinge Loss (SVM Loss)
铰链损失(SVM损失)通常用于支持向量机(SVM),它最大化分类边界。
数学公式:
- ( $y_{\text{true}}^i$ ) 是第 ( i ) 个样本的真实标签(取值为 ±1))。
- ( $y_{\text{pred}}^i $) 是第 ( i ) 个样本的预测值。
6. Huber Loss
Huber 损失对回归任务中的异常值进行了处理,当误差较小时使用平方误差,误差较大时使用线性误差。
数学公式:
- ( \delta ) 是一个超参数,控制“平滑”与“惩罚”之间的平衡。
- ( y_{\text{true}}^i ) 是第 ( i ) 个样本的真实值。
- ( y_{\text{pred}}^i ) 是第 ( i ) 个样本的预测值。
7. L2 Regularization Loss
L2 正则化损失常用于防止过拟合,鼓励模型参数的平方和较小。
数学公式:
- ( w_j ) 是模型参数的第 ( j ) 个权重。
- ( \lambda_{\text{reg}} ) 是正则化系数。
- ( M ) 是参数的数量。
- 惩罚的是参数的平方,所以对大的参数惩罚非常重(比如 w=10,惩罚是100;w=2,惩罚是4)。
- 它会让所有参数都向0收缩,但通常不会让任何参数精确为0。
- 结果是:所有特征都保留,但权重变小了,模型更平滑。
- 处理特征相关性强
8. L1 Regularization Loss
L1 正则化损失常用于促进稀疏性,鼓励模型参数为零。
数学公式:
- ( w_j ) 是模型参数的第 ( j ) 个权重。
- ( \lambda_{\text{reg}} ) 是正则化系数。
- ( M ) 是参数的数量。
- 惩罚的是参数的绝对值,对大参数和小参数的惩罚是线性的。
- 由于其几何特性(L1的等高线是菱形),优化过程中更容易“撞到角点”,而角点对应某些参数为0。
- 结果是:会把不重要的特征的权重直接压缩为0,实现特征选择
- 促进参数权重的稀疏性
9. Kullback-Leibler Divergence (KL Divergence)
KL 散度衡量两个概率分布之间的差异,常用于概率模型和生成模型。
数学公式:
- ( p_i ) 是真实分布的第 ( i ) 个概率值。
- ( q_i ) 是预测分布的第 ( i ) 个概率值。
10. Softmax Function
Softmax 函数将一个向量转换为概率分布,广泛应用于多分类问题。
数学公式:
- ( x_i ) 是输入向量 ( x ) 中的第 ( i ) 个元素。
- ( C ) 是类别的总数。
11. Softmax Loss
Softmax 损失(与交叉熵损失类似)常用于多分类问题中,结合 Softmax 函数计算损失。
数学公式:
- ( $y_{\text{true},c}^i \in \{0, 1\} $) 是第 ( i ) 个样本的真实标签的 one-hot 编码。
- ( $y_{\text{pred},c}^i $) 是第 ( i ) 个样本属于类别 ( c ) 的预测概率。
import numpy as np
# 1. Mean Squared Error (MSE)
def mean_squared_error(y_true, y_pred):
return np.mean((y_true - y_pred) ** 2)
# 2. Mean Absolute Error (MAE)
def mean_absolute_error(y_true, y_pred):
return np.mean(np.abs(y_true - y_pred))
# 3. Binary Cross-Entropy
def binary_crossentropy(y_true, y_pred):
epsilon = 1e-15 # Avoid log(0)
y_pred = np.clip(y_pred, epsilon, 1 - epsilon) # Prevent y_pred from being 0 or 1
return -np.mean(y_true * np.log(y_pred) + (1 - y_true) * np.log(1 - y_pred))
//把 y_pred 的所有值限制在 [epsilon, 1 - epsilon] 范围内
# 4. Categorical Cross-Entropy
def categorical_crossentropy(y_true, y_pred):
#numpy.clip(a, a_min, a_max, out=None)
epsilon = 1e-15 # 避免对数计算时出现log(0)
y_pred = np.clip(y_pred, epsilon, 1 - epsilon) # 防止y_pred为0或1
#y_true 必须是 one-hot 编码(独热编码) 的形式
return -np.mean(np.sum(y_true * np.log(y_pred), axis=1))
#axis=1出来时竖着,=0出来时横着
# 5. Hinge Loss (SVM Loss)
def hinge_loss(y_true, y_pred):
return np.mean(np.maximum(0, 1 - y_true * y_pred))
# 6. Huber Loss
def huber_loss(y_true, y_pred, delta=1.0):
error = np.abs(y_true - y_pred)
is_small_error = error <= delta
small_error_loss = 0.5 * error**2
large_error_loss = delta * (error - 0.5 * delta)
return np.mean(np.where(is_small_error, small_error_loss, large_error_loss))
# 7. L2 Regularization Loss
def l2_regularization_loss(weights, lambda_reg=0.01):
return lambda_reg * np.sum(weights**2)
# 8. L1 Regularization Loss
def l1_regularization_loss(weights, lambda_reg=0.01):
return lambda_reg * np.sum(np.abs(weights))
# 9. Kullback-Leibler Divergence (KL Divergence)
def kl_divergence(p, q):
epsilon = 1e-15 # Prevent log(0)
p = np.clip(p, epsilon, 1 - epsilon)
q = np.clip(q, epsilon, 1 - epsilon)
return np.sum(p * np.log(p / q))
# 10. Softmax Function
def softmax(x):
exp_x = np.exp(x - np.max(x, axis=-1, keepdims=True)) # Prevent overflow
return exp_x / np.sum(exp_x, axis=-1, keepdims=True)
# 11. Softmax Loss
def softmax_loss(y_true, y_pred):
epsilon = 1e-15
y_pred = np.clip(y_pred, epsilon, 1 - epsilon) # Prevent log(0)
return -np.mean(np.sum(y_true * np.log(y_pred), axis=1))
数据预处理
缺失值
如果数据中存在缺失值,可以选择填充它们,通常用均值或中位数来填充数值型数据。如果是类别数据,也可以选择填充众数。
mean_value = np.nanmean(column)#忽略nan值
column[np.isnan(column)] = mean_value # 填充nan缺失值为mean_value
import numpy as np
def fill_missing_values(data):
'''
使用每列的均值填充缺失值
:param data: 数据集,类型为ndarray
:return: 填充后的数据集
'''
# 遍历每一列,填充缺失值
for i in range(data.shape[1]):
column = data[:, i]
# 计算列的均值(忽略nan)
mean_value = np.nanmean(column)
# 填充缺失值
column[np.isnan(column)] = mean_value
return data
标准化
对特征进行标准化,使其均值为0,方差为1,避免特征尺度对模型产生不良影响。标准化可以使用 (x - mean) / std 的方式来实现。
means=np.mean(data,axis=0) #取每一个特征的均值
std=np.std(data,axis=0) #取每一个特征的标准差
def standardize_data(data):
'''
标准化数据:每个特征减去均值,再除以标准差
:param data: 数据集,类型为ndarray
:return: 标准化后的数据集
'''
# 计算每列的均值和标准差
means = np.mean(data, axis=0)
stds = np.std(data, axis=0)
# 标准化每一列
standardized_data = (data - means) / stds
return standardized_data
正则化

min_vals = np.min(data, axis=0)
max_vals = np.max(data, axis=0)def normalize_data(data):
'''
归一化数据:将每个特征缩放到[0, 1]范围内
:param data: 数据集,类型为ndarray
:return: 归一化后的数据集
'''
# 计算每列的最小值和最大值
min_vals = np.min(data, axis=0)
max_vals = np.max(data, axis=0)
# 归一化每一列
normalized_data = (data - min_vals) / (max_vals - min_vals)
return normalized_data
Z-score
可以使用 Z-Score 方法来去除异常值。通常认为 Z-Score 大于 3 或小于 -3 的样本是异常值。
filtered_data = data[np.all(np.abs(z_scores) < threshold, axis=1)]
axis=1:沿着列方向判断(即:对每个样本的所有特征判断)np.all:要求所有特征都满足条件(即:所有特征的 |Z| < threshold)
def remove_outliers(data, threshold=3):
'''
使用 Z-Score 去除异常值
:param data: 数据集,类型为ndarray
:param threshold: Z-Score 阈值,默认是3
:return: 去除异常值后的数据集
'''
# 计算每列的均值和标准差
means = np.mean(data, axis=0)
stds = np.std(data, axis=0)
# 计算 Z-Score
z_scores = (data - means) / stds
# 过滤 Z-Score 小于阈值的数据
filtered_data = data[np.all(np.abs(z_scores) < threshold, axis=1)]
return filtered_data
import numpy as np
def linear_regression_gradient_descent(X: np.ndarray, y: np.ndarray, alpha: float, iterations: int) -> np.ndarray:
# Your code here, make sure to round
m,n=X.shape
theta=np.zeros((n,1))
y = y.reshape(-1, 1) # (m,) -> (m, 1)
for i in range(iterations):
# 计算预测误差
error = X @ theta - y # (m, 1)
# 计算梯度: (1/m) * X^T @ error
gradient = (1/m) * X.T @ error
# 更新参数
theta -= alpha * gradient
return np.round(theta,4)Python 尝试广播 (3,1) 和 (3,),但广播规则不匹配,y reshape 成 (m, 1)
广义线性模型
线性回归
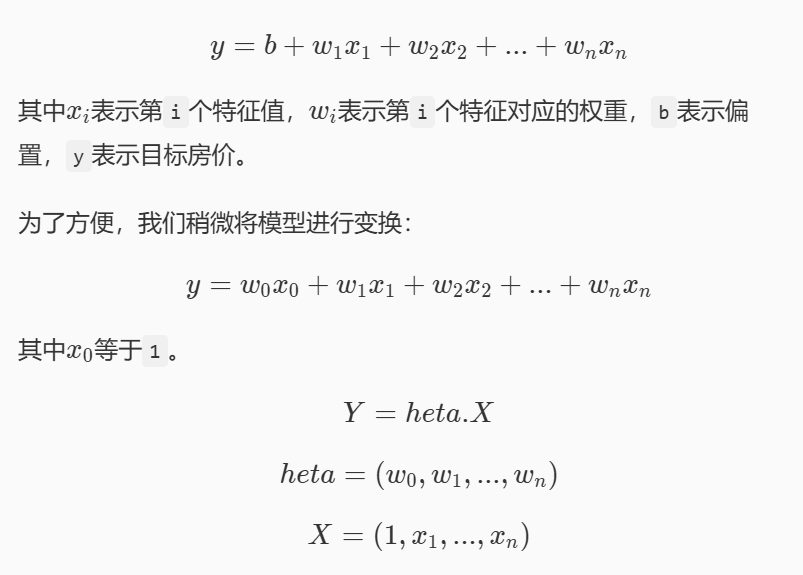

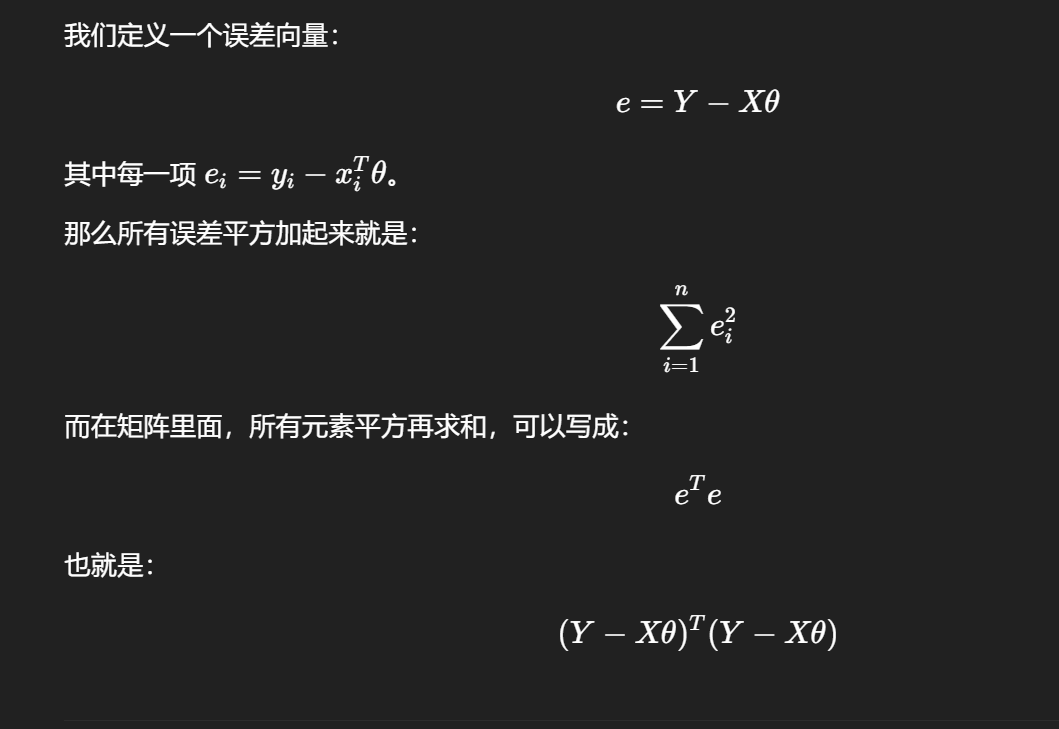
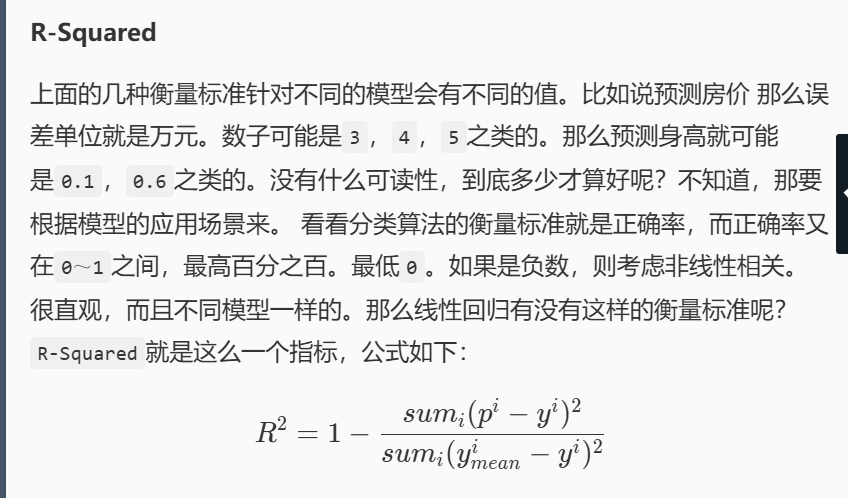
MSE(mean squard error) MAE(mean absolute error) RMSE(root mse) R^2(R-squard)
np.mean((y_predict - y_test) ** 2) #mean自带了求和功能
X = np.hstack((np.ones((train_data.shape[0], 1)), train_data))#hstack添加一个偏置项b,每个样本的bias特征值为1
np.linalg.inv(X.T.dot(X)).dot(X.T).dot(train_label)
numpy.var(array, axis) #var为方差variance,std为标准差
numpy.vstack(([1,2,3],[4,5,6])) 行顺序堆叠
import numpy as np
# MSE
def mse_score(y_predict, y_test):
return np.mean((y_predict - y_test) ** 2)
# R2
def r2_score(y_predict, y_test):
'''
input: y_predict (ndarray): 预测值
y_test (ndarray): 真实值
output: r2 (float): r2值
'''
t1 = np.sum((y_predict - y_test) ** 2)
t2 = np.sum((y_test - np.mean(y_test)) ** 2)
return 1 - t1 / t2
class LinearRegression:
def __init__(self):
'''初始化线性回归模型'''
self.theta = None
def fit_normal(self, train_data, train_label):
'''
input: train_data (ndarray): 训练样本
train_label (ndarray): 训练标签
'''
X = np.hstack((np.ones((train_data.shape[0], 1)), train_data))
#创建一个列向量,全为1,长度等于样本数
self.theta = np.linalg.inv(X.T.dot(X)).dot(X.T).dot(train_label)
return self.theta
def predict(self, test_data):
'''
input: test_data (ndarray): 测试样本
'''
test_data = np.hstack((np.ones((test_data.shape[0], 1)), test_data))
return test_data.dot(self.theta)
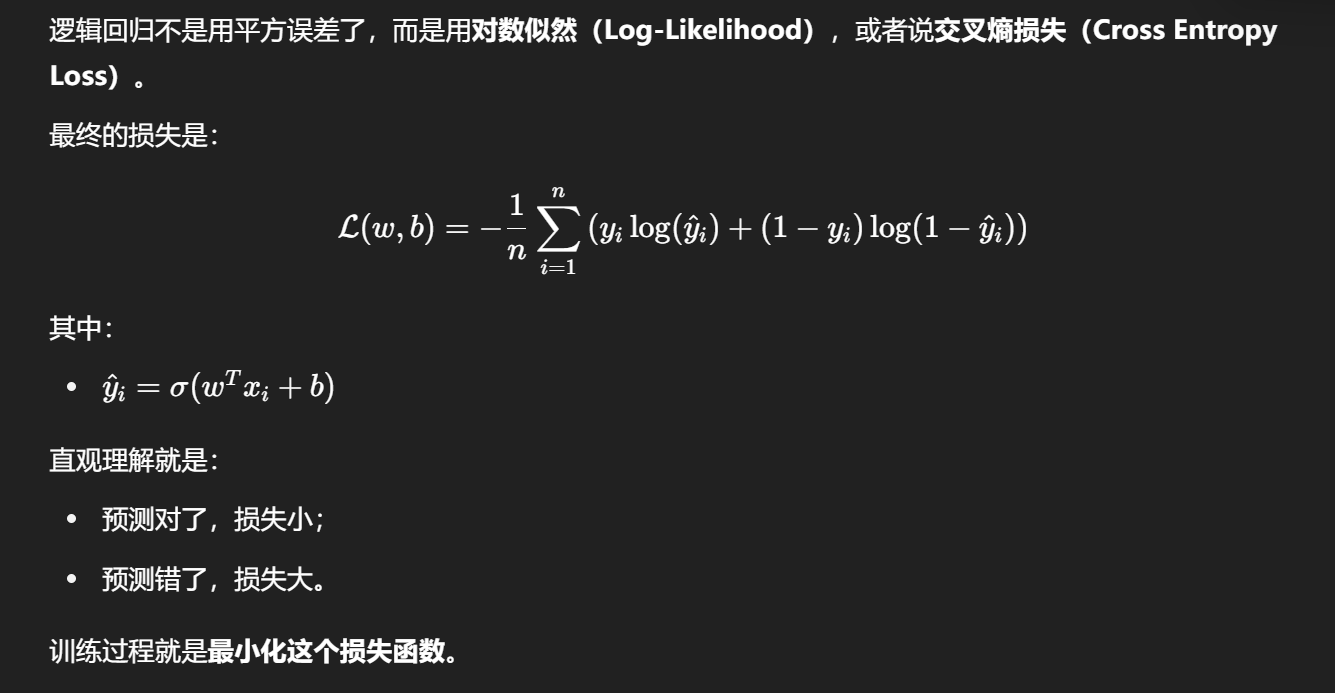
逻辑回归Logistic Regression
逻辑回归是通过回归的思想来解决二分类问题的算法,用一个S型的函数(Sigmoid函数),把线性回归的结果压缩到 [0,1] 区间,解释为“属于某个类别的概率”。它内部还是在做线性回归 wTx+b,只是最后加了一个非线性变换(Sigmoid),用来做分类概率输出。可以使用np.exp(-z)
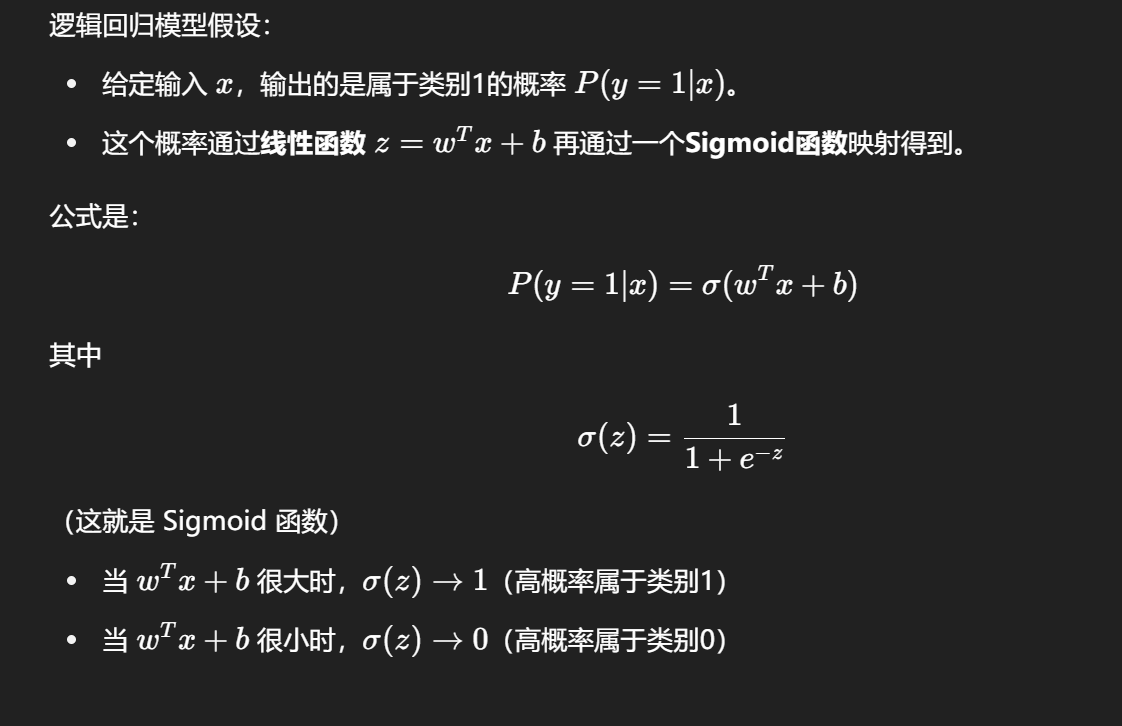
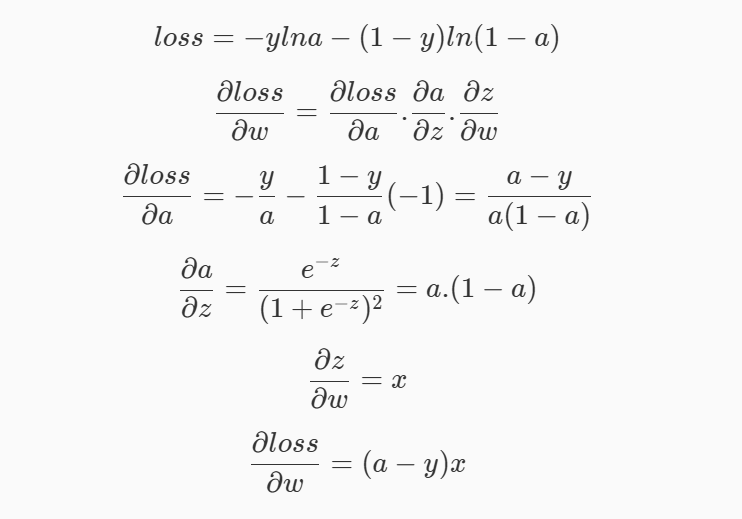
交叉熵损失yi代表真实类别,log(yi_hat)代表预测类别
梯度下降
沿着“当前点的负梯度方向”走一小步,就能慢慢靠近最小值,在多维空间中,梯度向量是函数增长最快的方向。
大学习率收敛快,迅速接近最优解,但是容易震荡无法收敛,小学习率稳定收敛到精确解(可能局部),但是慢
| 问题 | 过拟合 | 欠拟合 |
|---|---|---|
| 表现 | 训练误差低,测试误差高 | 训练误差和测试误差都高,模型过于简单或不充分学习数据特征 |
| 学习率过大 | 可能导致模型无法稳定收敛,训练过程震荡,导致最终过拟合训练数据 | 过大的学习率可能跳过局部最优,导致无法捕捉到数据中的复杂模式,出现欠拟合 |
| 学习率过小 | 可能导致训练过程过于缓慢,使得模型误学习训练数据中的噪声,过拟合 | 过小的学习率可能导致参数更新不足,学习不到数据的复杂模式,造成欠拟合 |
| 解决方法 | 增加正则化,减少模型复杂度,更多数据,适当调整学习率 | 增加模型复杂度,训练更多轮次,使用合适的学习率 |
# -*- coding: utf-8 -*-
import numpy as np
import warnings
warnings.filterwarnings("ignore")
def sigmoid(x):
'''
sigmoid函数
:param x: 转换前的输入
:return: 转换后的概率
'''
return 1/(1+np.exp(-x))
def fit(x,y,eta=1e-3,n_iters=10000):
'''
训练逻辑回归模型
:param x: 训练集特征数据,类型为ndarray
:param y: 训练集标签,类型为ndarray
:param eta: 学习率,类型为float
:param n_iters: 训练轮数,类型为int
:return: 模型参数,类型为ndarray
'''
# 请在此添加实现代码 #
#********** Begin *********#
m,n=x.shape
theta=np.zeros(n)
for i in range(n_iters):
yy=x.dot(theta)
z=sigmoid(yy)
grad=x.T.dot(z-y)
theta-=eta*grad
return theta
#********** End **********#
from sklearn.linear_model import LogisticRegression
def digit_predict(train_image, train_label, test_image):
'''
实现功能:训练模型并输出预测结果
:param train_sample: 包含多条训练样本的样本集,类型为ndarray,shape为[-1, 8, 8]
:param train_label: 包含多条训练样本标签的标签集,类型为ndarray
:param test_sample: 包含多条测试样本的测试集,类型为ndarry
:return: test_sample对应的预测标签
'''
#************* Begin ************#
train=train_image.reshape(len(train_image),-1)
#-1 表示自动计算维度,将除样本数量以外的维度全部拉平成一维。
test=test_image.reshape(len(test_image),-1)
model=LogisticRegression(max_iter=1000,C=12)
# C:正则化系数的倒数,默认为 1.0 ,越小代表正则化越强;
model.fit(train,train_label)
result=model.predict(test)
return result
#************* End **************#
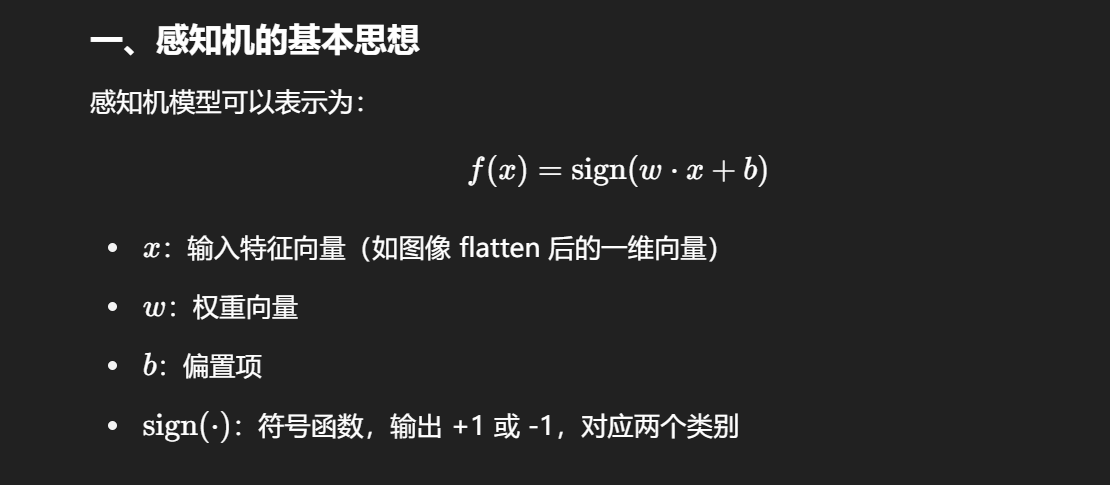
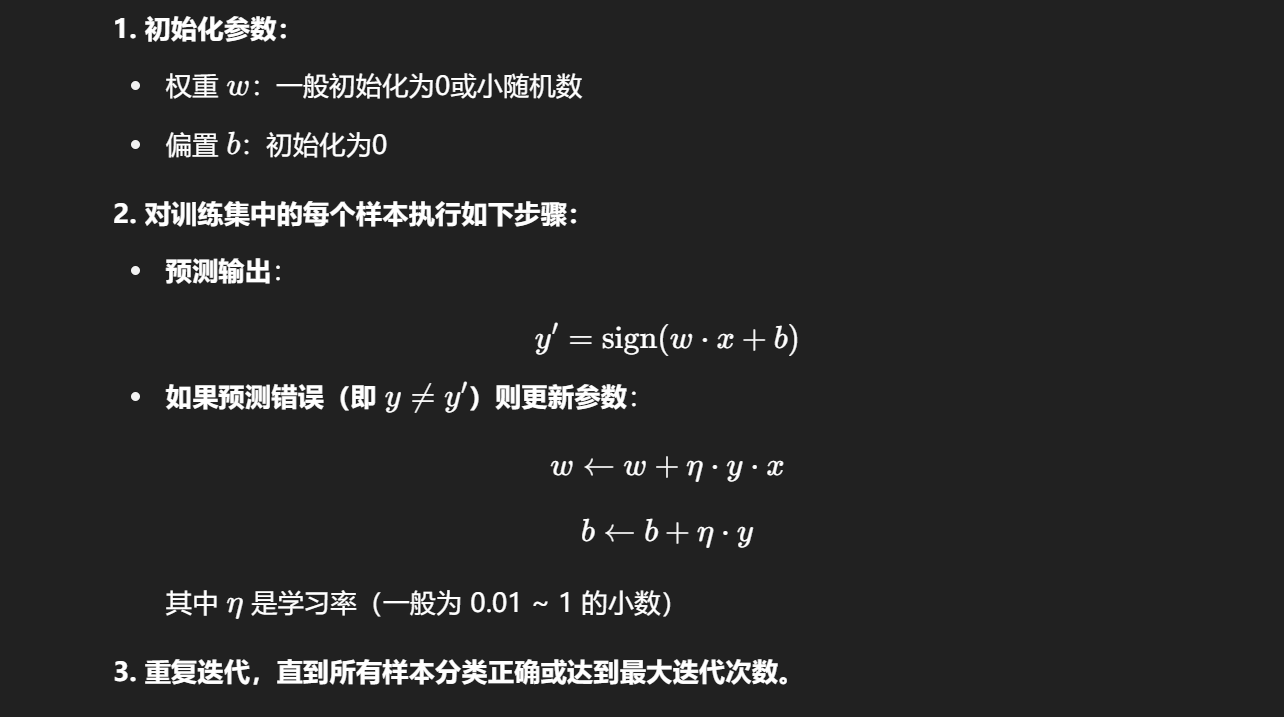
感知机
它是一个二分类线性模型,核心思想是:找到一个超平面,将两类数据线性分开。
适用于线性可分数据集:即存在一个超平面能将两类样本完全分开。
不能处理非线性问题:如异或问题(XOR)感知机无法解决。
predict = np.where(output > 0, 1, -1)
predict=np.sign(output)
#encoding=utf8
import numpy as np
#构建感知机算法
class Perceptron(object):
def __init__(self, learning_rate = 0.01, max_iter = 200):
self.lr=learning_rate
self.max_iter=max_iter
def fit(self, data, label):
'''
input:data(ndarray):训练数据特征
label(ndarray):训练数据标签
output:w(ndarray):训练好的权重
b(ndarry):训练好的偏置
'''
#编写感知机训练方法,w为权重,b为偏置
#********* Begin *********#
self.w=np.random.randn(data.shape[1])
self.b=0
for i in range(self.max_iter):
for j in range(len(data)):
output=self.w.dot(data[j].T)+self.b
predict=1 if output>0 else -1
if(label[j]*output<=0):
self.w+=self.lr*label[j]*data[j]
self.b+=self.lr*label[j]
#********* End *********#
def predict(self, data):
'''
input:data(ndarray):测试数据特征
output:predict(ndarray):预测标签
'''
#********* Begin *********#
output = np.dot(data, self.w) + self.b
predict = np.where(output > 0, 1, -1)
predict=np.sign(output)
#********* End *********#
return predict
#encoding=utf8
import os
import pandas as pd
from sklearn.linear_model.perceptron import Perceptron
if os.path.exists('./step2/result.csv'):
os.remove('./step2/result.csv')
#********* Begin *********#
train_data=pd.read_csv('./step2/train_data.csv')
train_label=pd.read_csv('./step2/train_label.csv')
train_label=train_label['target']
test_data=pd.read_csv('./step2/test_data.csv')
model=Perceptron(eta0=0.1,max_iter=500)
#eta0:学习率大小,默认为 1.0 ;
#max_iter:最大训练轮数。
model.fit(train_data,train_label)
prediction=model.predict(test_data)
res=pd.DataFrame(prediction,columns=['result'])
res.to_csv('./step2/result.csv',index=False)
#********* End *********#
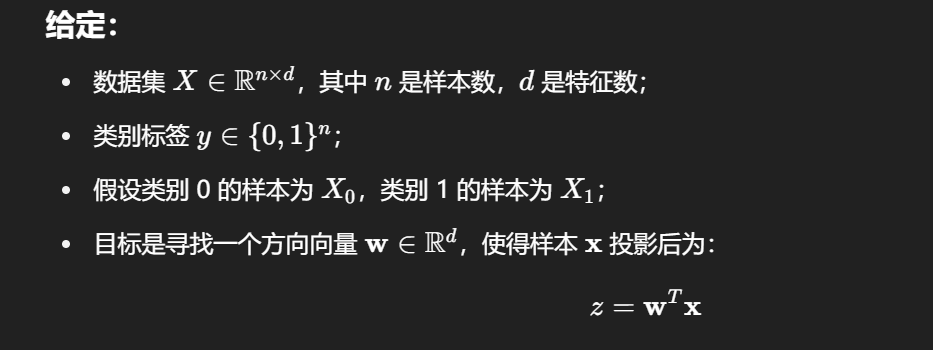
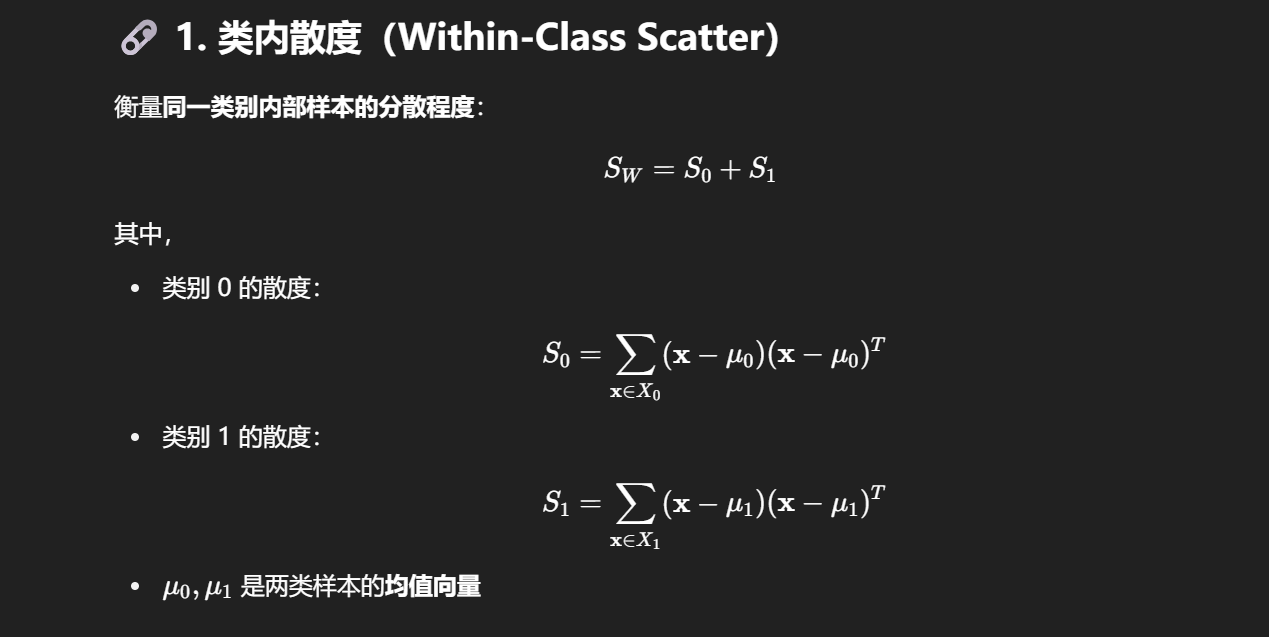
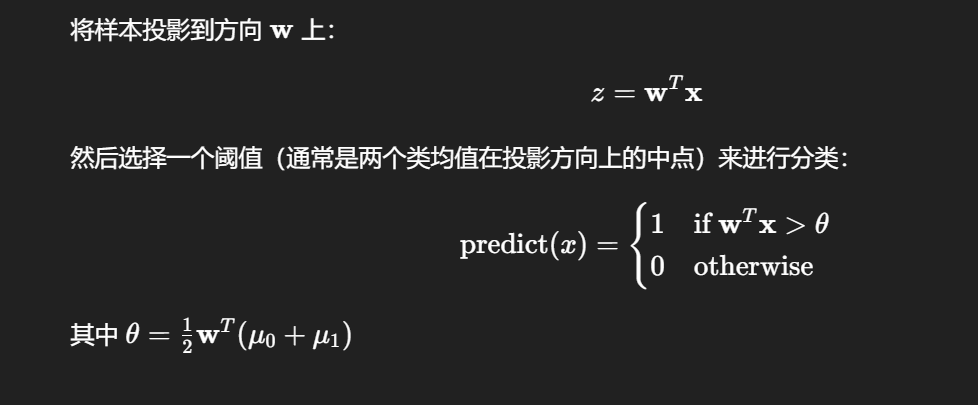
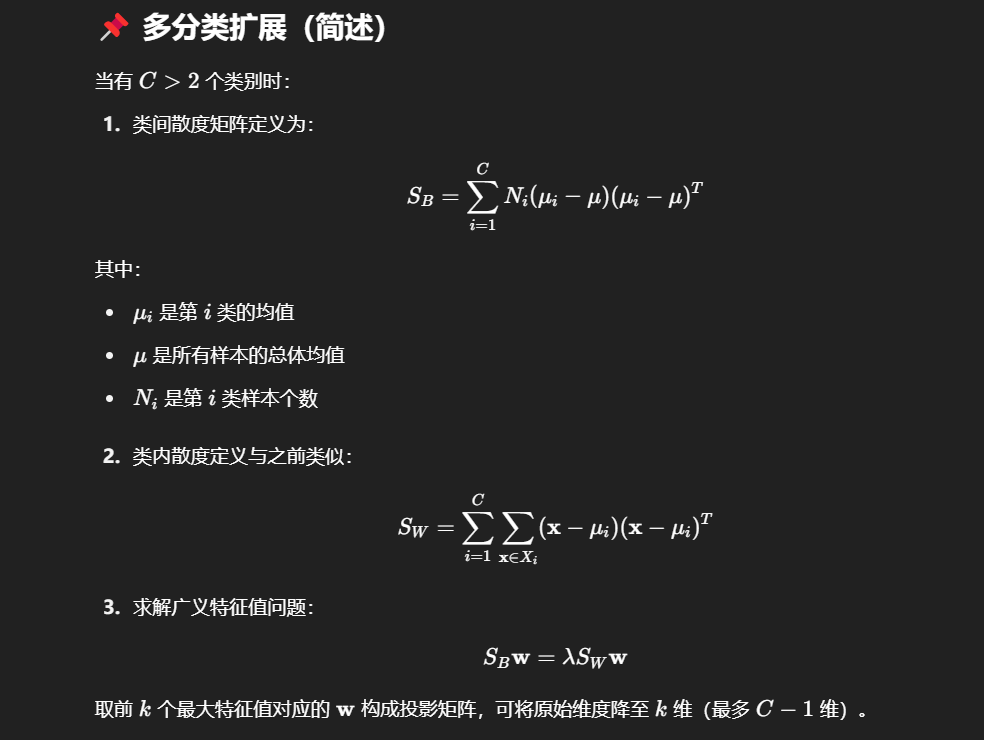
LDA(线性判别分析)
LDA 是一种 有监督降维 技术,其目标是将数据投影到一个低维空间中,使得不同类别之间尽可能可分。目标是最大化类间散度(类之间的距离),最小化类内散度(每类自己的分散程度)。
x0m = np.mean(x0, axis=0) # 类别 0 的均值向量,求样本的每个特征均值要加axis=0
sigma0 = np.cov(x0, rowvar=False)#默认 np.cov 会按行计算特征(即样本是列),但我们通常每一行是一个样本,所以需要加.T或使用rowvar=False
mean_diff = (x0m - x1m).reshape(-1, 1) # 列向量化, shape=(n,) 变成 shape=(n, 1),列向量
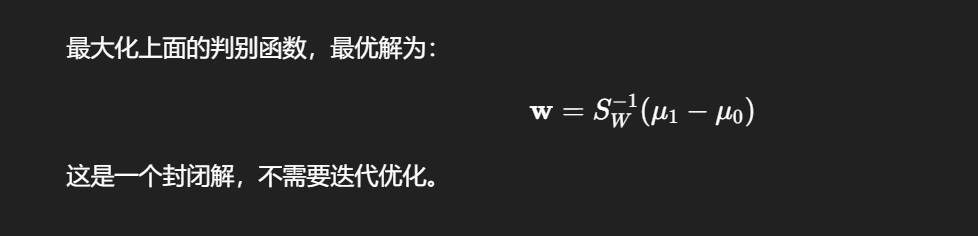
return np.linalg.inv(sw).dot(x0m - x1m)
x_new = model.fit_transform(x, y)
import numpy as np
def lda(X, y):
'''
线性判别分析(Linear Discriminant Analysis)
参数:
X(ndarray): 样本特征矩阵,形状为 (n_samples, n_features)
y(ndarray): 样本标签向量,取值为 0 或 1(仅支持二分类)
返回:
w(ndarray): 最优投影方向向量,用于将高维数据投影到一维,实现类别分离
'''
# 将数据按类别分开(这里是二分类,分成类 0 和类 1)
x0 = X[y == 0] # 类别 0 的所有样本
x1 = X[y == 1] # 类别 1 的所有样本
# 分别计算每一类的均值向量(每个特征的均值)
x0m = np.mean(x0, axis=0) # 类别 0 的均值向量
x1m = np.mean(x1, axis=0) # 类别 1 的均值向量
# 分别计算每一类的类内协方差矩阵(每一类内部的样本方差+协方差)
# rowvar=False 表示按列计算协方差(列是特征,行是样本)
sigma0 = np.cov(x0, rowvar=False)
sigma1 = np.cov(x1, rowvar=False)
# 总类内散度矩阵 Sw(两个类别的协方差矩阵之和)
sw = sigma0 + sigma1
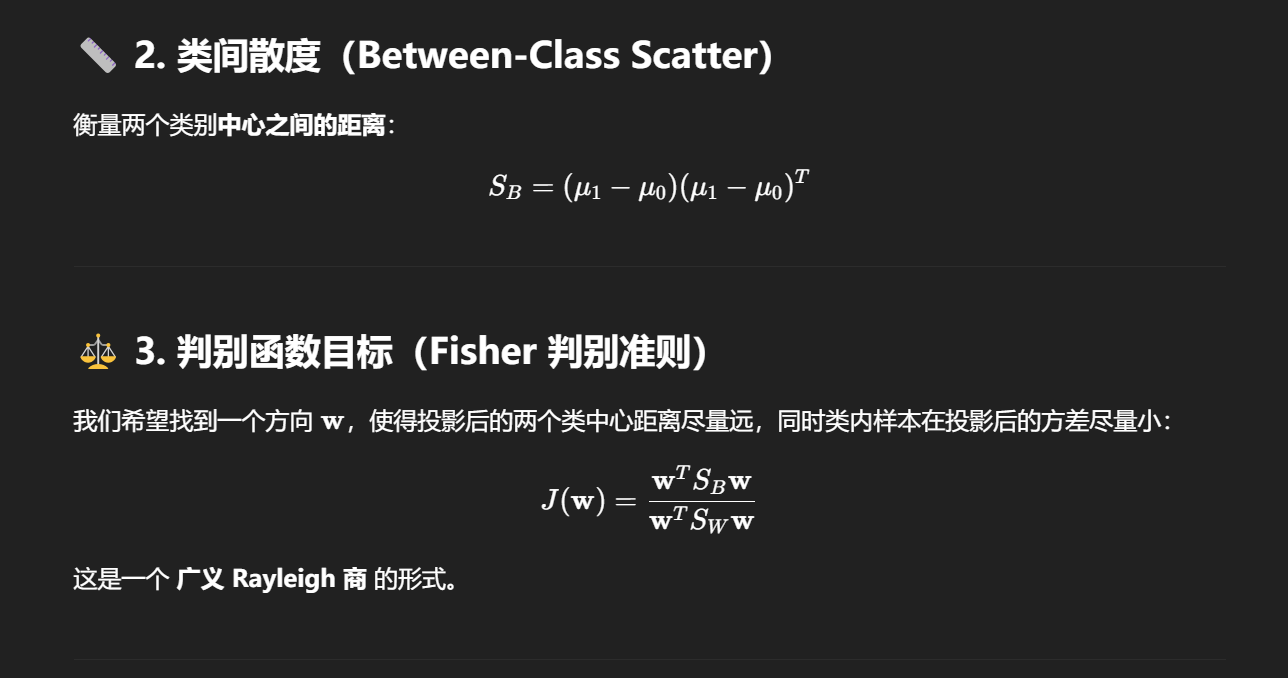
# 类间散度矩阵 Sb = (μ1 - μ0)(μ1 - μ0)^T,衡量类别中心的分离程度
mean_diff = (x0m - x1m).reshape(-1, 1) # 列向量化
sb = mean_diff @ mean_diff.T # 外积构成类间散度矩阵
# 计算广义特征值问题 Sw^-1 * Sb 的特征值与特征向量
eigvals, eigvecs = np.linalg.eig(np.linalg.inv(sw).dot(sb))
# 将特征值按从大到小排序,找出最大特征值对应的方向
idx = np.argsort(eigvals)[::-1] # 逆序排列索引
w = eigvecs[:, idx[0]] # 最大特征值对应的特征向量(最佳投影方向)
return w # 返回用于降维的最优方向向量
#encoding=utf8
from sklearn.discriminant_analysis import LinearDiscriminantAnalysis
def lda(x,y):
'''
input:x(ndarray):待处理数据
y(ndarray):待处理数据标签
output:x_new(ndarray):降维后数据
'''
model = LinearDiscriminantAnalysis(n_components=2)
x_new = model.fit_transform(x, y)
return x_new多分类策略
OvO
将 K 类的多分类问题拆分为 $\frac{K(K-1)}{2}$ 个二分类问题,每个分类器只区分两个类别。
对于任意两个类别 $c_i$ 与 $c_j$($i < j$):
从数据集中仅选出这两个类别的样本。
用二分类模型训练出分类器 $f_{i,j}$,判断样本属于 $c_i$ 还是 $c_j$。
最终得到 $\frac{K(K-1)}{2}$ 个分类器。
对测试样本 $x$,输入所有分类器 $f_{i,j}$。
每个分类器对样本进行投票(即判断更像哪个类别)。
汇总投票,得票最多的类别为最终预测类别。
self.classes_ = np.unique(y)
self.models[(cls1, cls2)] = model map
votes = [defaultdict(int) for _ in range(len(X))]
for (cls1, cls2), model in self.models.items()
`enumerate(preds) 的作用是:在遍历预测结果 preds 的同时,提供每个预测结果的索引。它返回的是 (索引, 值) 对。`
from collections import defaultdict
from sklearn.linear_model import LogisticRegression
class OvOClassifier:
def __init__(self, base_model=None):
self.base_model = base_model if base_model else LogisticRegression()
self.models = {}
self.classes_ = None
def fit(self, X, y):
self.classes_ = np.unique(y)
self.models = {}
for i in range(len(self.classes_)):
for j in range(i + 1, len(self.classes_)):
cls1, cls2 = self.classes_[i], self.classes_[j]
# 找到所有属于 cls1 或 cls2 的样本
X_pair = []
y_binary = []
for xi, yi in zip(X, y):
if yi == cls1 or yi == cls2:
X_pair.append(xi)
y_binary.append(1 if yi == cls1 else 0)
X_pair = np.array(X_pair)
y_binary = np.array(
model = LogisticRegression()
model.fit(X_pair, y_binary)
self.models[(cls1, cls2)] = model
#是一个 字典,key 是一个类别对的 元组,value 是对应的 训练好的模型对象
def predict(self, X):
votes = [defaultdict(int) for _ in range(len(X))]
#创建了一个列表 votes,这个列表有 len(X) 个元素,每个元素是一个 defaultdict(int)
for (cls1, cls2), model in self.models.items():
preds = model.predict(X)
for i, pred in enumerate(preds):
voted_class = cls1 if pred == 1 else cls2
votes[i][voted_class] += 1
final_preds = []
final_preds = [max(vote, key=vote.get) for vote in votes]
#vote 是一个 dict(通常是像 {'A': 2, 'B': 3} 这样的结构),键是类别,值是票数;
#vote.get 用作 key 函数,表示对每个键使用 vote.get(键) 作为排序依据;
#max(...) 找出拥有最多票数的类别。
return np.array(final_preds)
OvR
将一个 K 类的多分类问题拆解为 K 个二分类问题。每个分类器的任务是识别某一个类别(“正类”)与其余所有类别(“负类”)之间的区别。
假设标签集合为 $C = {c_1, c_2, …, c_K}$
对于每一个类别 $c_i$:
创建一个新的二分类训练集:
样本属于 $c_i$ 的,标签为 1(正类)
样本不属于 $c_i$ 的,标签为 0(负类)
用一个二分类器(如 Logistic Regression、SVM)训练该数据子集。
共训练 K 个分类器,分别记为 $f_1, f_2, …, f_K$。
对于一个测试样本 $x$,将其输入所有分类器 $f_1(x), …, f_K(x)$。
每个分类器输出一个置信度/得分。
选择得分最高的那个分类器所代表的类别作为预测结果。
| 特性 | OvR (One-vs-Rest) | OvO (One-vs-One) |
|---|---|---|
| 分类器数量 | K | K(K-1)/2 |
| 每个分类器训练样本 | 全部样本(正类 vs 其他) | 两类样本 |
| 预测机制 | 最大置信度 | 多数投票 |
| 实现复杂度 | 较低 | 较高 |
| 优点 | 简洁、高效 | 更适合类别数少、边界复杂的任务 |
| 缺点 | 易受类别不均衡影响 | 分类器数量多、计算成本高 |
import numpy as np
# 逻辑回归类
class tiny_logistic_regression(object):
def __init__(self):
# W 是系数,b 是截距
self.coef_ = None
self.intercept_ = None
self._theta = None # 存储所有的 W 和 b
self.label_map = {} # 0/1 到标签的映射
def _sigmoid(self, x):
return 1. / (1. + np.exp(-x)) # Sigmoid 激活函数
# 训练模型
def fit(self, train_datas, train_labels, learning_rate=1e-4, n_iters=1e3):
# 计算损失函数
def J(theta, X_b, y):
y_hat = self._sigmoid(X_b.dot(theta))
try:
return -np.sum(y * np.log(y_hat) + (1 - y) * np.log(1 - y_hat)) / len(y)
except:
return float('inf') # 避免计算出错
# 损失函数对 theta 的梯度
def dJ(theta, X_b, y):
return X_b.T.dot(self._sigmoid(X_b.dot(theta)) - y) / len(y)
# 批量梯度下降
def gradient_descent(X_b, y, initial_theta, learning_rate, n_iters=1e2, epsilon=1e-6):
theta = initial_theta
cur_iter = 0
while cur_iter < n_iters:
gradient = dJ(theta, X_b, y)
last_theta = theta
theta = theta - learning_rate * gradient # 更新 theta
# 判断是否满足收敛条件
if abs(J(theta, X_b, y) - J(last_theta, X_b, y)) < epsilon:
break
cur_iter += 1
return theta
# 将训练数据加上截距项(x0 = 1)
X_b = np.hstack([np.ones((len(train_datas), 1)), train_datas])
initial_theta = np.zeros(X_b.shape[1]) # 初始化theta为零
self._theta = gradient_descent(X_b, train_labels, initial_theta, learning_rate, n_iters)
self.intercept_ = self._theta[0]
self.coef_ = self._theta[1:]
return self
# 预测样本属于正类的概率
def predict_proba(self, X):
X_b = np.hstack([np.ones((len(X), 1)), X])
return self._sigmoid(X_b.dot(self._theta))
# 预测:如果属于正类的概率 >= 0.5,则预测为1,否则为0
def predict(self, X):
proba = self.predict_proba(X)
return np.array(proba >= 0.5, dtype='int')
# One-vs-Rest (OvR) 分类器
class OvR(object):
def __init__(self):
self.models = [] # 用于保存每个类别的二分类器
self.real_label = [] # 用于保存正类标签
def fit(self, train_datas, train_labels):
'''
OvR的训练阶段,将模型保存到self.models中
:param train_datas: 训练集数据,类型为ndarray
:param train_labels: 训练集标签,类型为ndarray,shape为(-1,)
:return: None
'''
self.classes = np.unique(train_labels) # 获取所有类别标签
for cls in self.classes:
# 将当前类别作为正类,其他类别作为负类
y_binary = (train_labels == cls).astype(int)
model = tiny_logistic_regression()
model.fit(train_datas, y_binary) # 使用二分类器训练模型
self.models.append(model) # 将训练好的模型加入模型列表
self.real_label.append(cls) # 保存当前类别的标签
def predict(self, test_datas):
'''
OvR的预测阶段
:param test_datas: 测试集数据,类型为ndarray
:return: 预测结果,类型为ndarray
'''
# 存储每个样本对每个类别的概率
all_probs = np.zeros((len(test_datas), len(self.classes)))
for i, model in enumerate(self.models):
# 获取每个模型对每个测试样本属于该类别的概率
probs = model.predict_proba(test_datas)
all_probs[:, i] = probs # 存储该类别的概率
# 每个样本选择概率最大的类别
predicted_class_indices = np.argmax(all_probs, axis=1)
return self.real_label[predicted_class_indices] # 返回每个样本的最终预测类别
决策树
信息增益
np.log2,Counter,len,np.unique
for label,count in labelcount.items():
import numpy as np
from collections import Counter
def calcInfoGain(feature, label, index):
'''
计算信息增益
:param feature: 测试用例中的特征矩阵,类型为ndarray
:param label: 测试用例中的标签,类型为ndarray
:param index: 特征列的索引,指示使用第几个特征来计算信息增益。
:return: 信息增益,类型float
'''
# 计算原始熵
all_count = len(label)
# 获取标签的频率
label_count = Counter(label)
# 计算标签的熵
all_entropy = 0
for label_value, count in label_count.items():
p = count / all_count
all_entropy -= p * np.log2(p)
# 计算按特征划分后的熵
feature_values = np.unique(feature[:, index]) # 获取该特征的所有可能值
# feature[:, index] 表示选择 feature 矩阵的所有行(: 表示所有行),但是只选择第 index 列(即该列所有样本的特征值)。
weighted_entropy = 0
for value in feature_values:
# 根据特征值划分数据
subset_label = label[feature[:, index] == value]
subset_count = len(subset_label)
# 计算子集的熵
subset_entropy = 0
subset_label_count = Counter(subset_label)
for subset_label_value, count in subset_label_count.items():
p = count / subset_count
subset_entropy -= p * np.log2(p)
# 加权平均子集的熵
weighted_entropy += (subset_count / all_count) * subset_entropy
# 信息增益 = 总熵 - 加权熵
info_gain = all_entropy - weighted_entropy
return info_gain return info_gain信息增益率
def calcInfoGainRatio(feature, label, index):
#********* Begin *********#
all_count=len(label)
#D
needE=0
all_features = np.unique(feature[:, index]) # 获取该特征列的所有唯一值
for f in all_features:
count=0
for j in range(len(label)):
if feature[j][index]==f:
count+=1
#D1
needE-=(count/all_count)*np.log2(count/all_count)
gain=calcInfoGain(feature,label,index)
return gain/needE
#********* End *********#Gini系数
def calcGini(feature, label, index):
'''
'''
#********* Begin *********#
#先计算特征个数,在用特征里面的小个数计算
allcount=len(label)
feats=np.unique(feature[:,index])
Gini=0
for val in feats:
sub_count=0
sublabels=[]
subG=1
for j in range(allcount):
if feature[j][index]==val:
sub_count+=1
sublabels.append(label[j])
label_count=Counter(sublabels)
for la,co in label_count.items():
subG-=(co/sub_count)**2
Gini+=subG*(sub_count/allcount)
return Gini
#********* End *********#鸢尾花识别
pd.read_csv,to_csv,DataFrame,
import numpy as np
from sklearn.tree import DecisionTreeClassifier
import pandas as pd
#********* Begin *********#
model=DecisionTreeClassifier()
train_label = pd.read_csv('./step7/train_label.csv').values
train_data = pd.read_csv('./step7/train_data.csv').values
test_data = pd.read_csv('./step7/test_data.csv').values
model.fit(train_data,train_label)
result=model.predict(test_data)
resultd=pd.DataFrame(result,columns=['prediction'])
resultd.to_csv('./step7/predict.csv',index=False)
#********* End *********#贝叶斯分类器
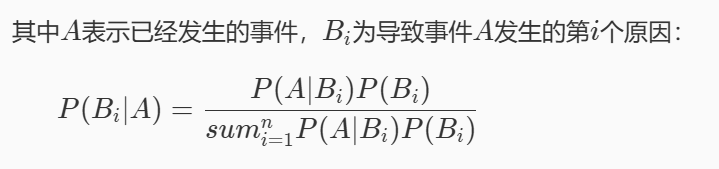
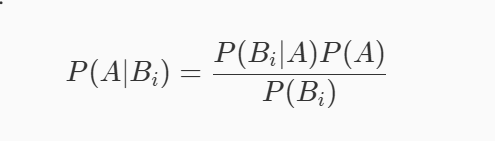
全概率公式

贝叶斯公式(条件概率乘法定理/全概率公式)
朴素贝叶斯分类
label_val, label_count = np.unique(label, return_counts=True)
self.label_prob = {label_val[i]: label_count[i] / all_count for i in range(len(label_val))}
feat_lines = feature[label == val]
for a, b in zip(feat_val, feat_count):
import numpy as np
class NaiveBayesClassifier(object):
def __init__(self):
self.label_prob = {} # 每种类别在数据中出现的概率
self.condition_prob = {} # 条件概率 P(x|y)
def fit(self, feature, label):
'''
对模型进行训练,计算各种概率
:param feature: 训练数据集的特征,ndarray
:param label: 训练数据集的标签,ndarray
:return: 无返回
'''
# 计算每个标签的概率 P(y)
label_val, label_count = np.unique(label, return_counts=True)
all_count = len(label)
self.label_prob = {label_val[i]: label_count[i] / all_count for i in range(len(label_val))}
# 计算每个标签下特征的条件概率 P(x|y)
feat_num = feature.shape[1] # 特征数量
self.condition_prob = {}
for val in label_val:
feat_lines = feature[label == val] # 当前标签下的特征数据
feature_prob = {}
for i in range(feat_num):
feat_val, feat_count = np.unique(feat_lines[:, i], return_counts=True) # 当前特征列的取值及其频数
feature_prob[i] = {}
sub_count = len(feat_lines)
for a, b in zip(feat_val, feat_count):
feature_prob[i][a] = b / sub_count # 计算条件概率
self.condition_prob[val] = feature_prob # 保存当前标签的条件概率
def predict(self, feature):
'''
对数据进行预测,返回预测结果
:param feature: 测试数据集所有特征组成的ndarray
:return: 预测的标签
'''
predictions = []
for sample in feature:
label_post = {}
# 计算每个标签的后验概率 P(y|x)
for label_val, prob in self.label_prob.items():
probability = np.log2(prob) # P(y)
# 计算当前标签下的条件概率 P(x|y)
for idx, val in enumerate(sample):
probability += np.log2(self.condition_prob[label_val][idx].get(val, 1e-10))
label_post[label_val] = probability
# 选择后验概率最大的标签作为预测结果
predict = max(label_post, key=label_post.get)
predictions.append(predict)
return np.array(predictions) # 返回 numpy 数组
Laplace平滑
假设N表示训练数据集总共有多少种类别,Ni表示训练数据集中第i列总共有多少种取值。则训练过程中在算类别的概率时分子加1,分母加N,算条件概率时分子加1,分母加Ni
import numpy as np
class NaiveBayesClassifier(object):
def __init__(self):
'''
'''
self.label_prob = {} # 存储每个类别的先验概率
self.condition_prob = {} # 存储每个类别下每个特征的条件概率
def fit(self, feature, label):
'''
对模型进行训练,计算每种类别的先验概率和条件概率
:param feature: 训练数据集所有特征组成的 ndarray
:param label: 训练数据集所有标签组成的 ndarray
:return: 无返回值,通过更新 self.label_prob 和 self.condition_prob 来保存训练结果
'''
#********* Begin *********#
row_num = len(feature) # 样本的数量
col_num = len(feature[0]) # 特征的数量
unique_label_count = len(set(label)) # 唯一类别的数量
# 计算每个类别的出现次数
for c in label:
if c in self.label_prob:
self.label_prob[c] += 1
else:
self.label_prob[c] = 1
# 计算每个类别的先验概率,并进行拉普拉斯平滑
for key in self.label_prob.keys():
self.label_prob[key] += 1 # 拉普拉斯平滑
self.label_prob[key] /= (unique_label_count + row_num) # 计算先验概率
# 构建条件概率字典,初始化每个类别下每个特征值的概率
self.condition_prob[key] = {}
for i in range(col_num):
self.condition_prob[key][i] = {}
for k in np.unique(feature[:, i], axis=0): # 遍历每个特征的不同取值
self.condition_prob[key][i][k] = 1 # 初始概率设为 1(拉普拉斯平滑)
# 统计训练集中每个类别下特征值的频次
for i in range(len(feature)):
for j in range(len(feature[i])):
# 更新每个特征值的出现频次
self.condition_prob[label[i]][j][feature[i][j]] += 1
# 计算每个类别下每个特征值的条件概率,进行拉普拉斯平滑
for label_key in self.condition_prob.keys():
for k in self.condition_prob[label_key].keys():
total = len(self.condition_prob[label_key][k].keys()) # 特征的种类数
for v in self.condition_prob[label_key][k].values():
total += v # 总的计数值(包括平滑项)
for kk in self.condition_prob[label_key][k].keys():
# 计算条件概率
self.condition_prob[label_key][k][kk] /= total
#********* End *********#
def predict(self, feature):
'''
对数据进行预测,返回预测结果
:param feature: 测试数据集所有特征组成的 ndarray
:return: 预测结果的数组,包含每个测试样本的预测类别
'''
result = [] # 存储预测结果
# 对每条测试数据进行预测
for i, f in enumerate(feature):
prob = np.zeros(len(self.label_prob.keys())) # 存储每个类别的概率,初始化为零
ii = 0 # 用于索引类别
for label, label_prob in self.label_prob.items():
prob[ii] = label_prob # 初始化为先验概率
for j in range(len(f)): # 遍历当前样本的所有特征
# 计算该特征值在该类别下的条件概率
prob[ii] *= self.condition_prob[label][j][f[j]]
ii += 1 # 处理下一个类别
# 选择具有最大概率的类别作为预测结果
result.append(list(self.label_prob.keys())[np.argmax(prob)])
return np.array(result) # 返回预测结果
新闻文本分类
from sklearn.feature_extraction.text import CountVectorizer
from sklearn.naive_bayes import MultinomialNB
from sklearn.feature_extraction.text import TfidfTransformer
import numpy as np
def news_predict(train_sample, train_label, test_sample):
'''
训练模型并进行预测,返回预测结果
:param train_sample: 原始训练集中的新闻文本,类型为 ndarray
:param train_label: 训练集中新闻文本对应的主题标签,类型为 ndarray
:param test_sample: 原始测试集中的新闻文本,类型为 ndarray
:return: 预测结果,类型为 ndarray
'''
#********* Begin *********#
# 实例化CountVectorizer,转换文本为词频矩阵
vec = CountVectorizer()
X_train = vec.fit_transform(train_sample) # 先fit拟合训练集,再对训练集进行词频向量化
X_test = vec.transform(test_sample) # 对测试集进行词频向量化
# 实例化TfidfTransformer,转换为TF-IDF矩阵
tfidf = TfidfTransformer()
X_train = tfidf.fit_transform(X_train) # 将训练集词频矩阵转换为TF-IDF矩阵
X_test = tfidf.transform(X_test) # 将测试集词频矩阵转换为TF-IDF矩阵
# 实例化MultinomialNB模型,设置平滑参数alpha=0.8
model = MultinomialNB(alpha=0.8)
model.fit(X_train, train_label) # 使用训练集训练模型
# 预测测试集的标签
result = model.predict(X_test)
# 返回预测结果
return np.array(result)
#********* End *********#
支持向量机
线性SVM
计算训练数据的均值和标准差
mean = np.mean(train_data, axis=0)
std = np.std(train_data,axis=0)
train_data = (train_data - mean) / std
model = LinearSVC(C=10, max_iter=10000) # 增大C的值并增加最大迭代次数
C(正则化参数): 控制模型的复杂度,较大的 C 值会让模型更加“严格”地拟合训练数据,但可能导致过拟合。较小的 C 值则允许更多的错误,从而使得模型更为平滑,防止过拟合
#encoding=utf8
from sklearn.svm import LinearSVC
import pandas as pd
import numpy as np
def linearsvc_predict(train_data,train_label,test_data):
'''
input:train_data(ndarray):训练数据
train_label(ndarray):训练标签
output:predict(ndarray):测试集预测标签
'''
# ********* Begin *********#
# 1. 数据标准化(手动进行标准化:均值0,方差1)
# 计算训练数据的均值和标准差
mean = np.mean(train_data, axis=0)
std = np.std(train_data, axis=0)
# 对训练数据和测试数据进行标准化
train_data = (train_data - mean) / std
test_data = (test_data - mean) / std
# 2. 创建并训练模型
model = LinearSVC(C=10, max_iter=10000) # 增大C的值并增加最大迭代次数
model.fit(train_data, train_label)
# 3. 预测测试数据
predict = model.predict(test_data)
# ********* End *********#
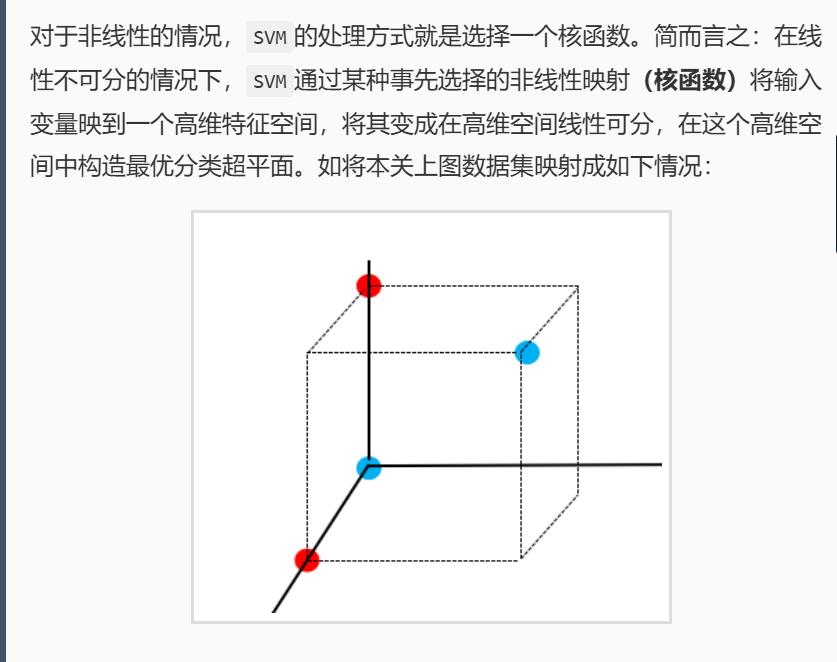
return predict非线性SVM
#encoding=utf8
from sklearn.svm import SVC
def svc_predict(train_data,train_label,test_data,kernel):
'''
input:train_data(ndarray):训练数据
train_label(ndarray):训练标签
kernel(str):使用核函数类型:
'linear':线性核函数
'poly':多项式核函数
'rbf':径像核函数/高斯核
output:predict(ndarray):测试集预测标签
'''
#********* Begin *********#
model=SVC(kernel=kernel)
model.fit(train_data,train_label)
predict=model.predict(test_data)
#********* End *********#
return predict集成学习
boosting
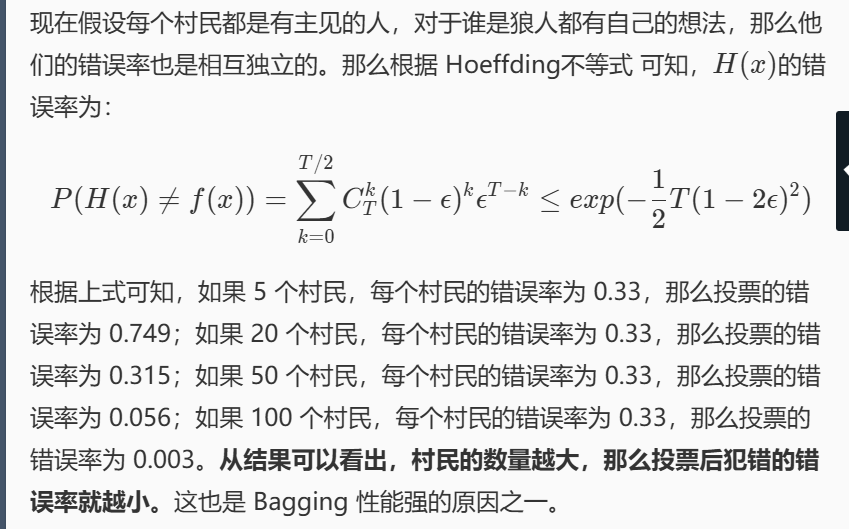
提升方法基于这样一种思想:对于一个复杂任务来说,将多个专家的判断进行适当的综合所得出的判断,要比其中任何一个专家单独的判断好。
历史上,Kearns 和 Valiant 首先提出了强可学习和弱可学习的概念指出:在 PAC 学习的框架中,一个概念,
如果存在一个多项式的学习算法能够学习它,并且正确率很高,那么就称这个概念是强可学习的;
一个概念,如果存在一个多项式的学习算法能够学习它,学习的正确率仅比随机猜测略好,那么就称这个概念是弱可学习的。
非常有趣的是 Schapire 后来证明强可学习与弱可学习是等价的,也就是说,在 PAC 学习的框架下,一个概念是强可学习的充分必要条件是这个概念是弱可学习的。
这样一来,问题便成为,在学习中,如果已经发现了弱学习算法,那么能否将它提升为强学习算法。大家知道,发现弱学习算法通常要比发现强学习算法容易得多。那么如何具体实施提升,便成为开发提升方法时所要解决的问题。
与 bagging 不同, boosting 采用的是一个串行训练的方法。首先,它训练出一个弱分类器,然后在此基础上,再训练出一个稍好点的弱分类器,以此类推,不断的训练出多个弱分类器,最终再将这些分类器相结合,这就是 boosting 的基本思想
可以看出,子模型之间存在强依赖关系,必须串行生成。 boosting 是利用不同模型的相加,构成一个更好的模型,求取模型一般都采用序列化方法,后面的模型依据前面的模型
Adaboost算法原理
对提升方法来说,有两个问题需要回答:一是在每一轮如何改变训练数据的权值或概率分布;二是如何将弱分类器组合成一个强分类器
关于第 1 个问题,AdaBoost的做法是,提高那些被前一轮弱分类器错误分类样本的权值,而降低那些被正确分类样本的权值
这样一来,那些没有得到正确分类的数据,由于其权值的加大而受到后一轮的弱分类器的更大关注。于是,分类问题被一系列的弱分类器“分而治之”。
至于第 2 个问题,即弱分类器的组合,AdaBoost采取加权多数表决的方法,加大分类误差率小的弱分类器的权值,使其在表决中起较大的作用,减小分类误差率大的弱分类器的权值,使其在表决中起较小的作用。
bagging
与 Boosting 这种串行集成学习算法不同, Bagging 是并行式集成学习方法。
如果使用 Bagging 解决分类问题,就是将多个分类器的结果整合起来进行投票,选取票数最高的结果作为最终结果。如果使用 Bagging 解决回归问题,就将多个回归器的结果加起来然后求平均,将平均值作为最终结果。
n足够大时,考虑用正态分布来拟合二项分布
Bagging 在训练时的特点就是随机有放回采样和并行。
随机有放回采样: 假设训练数据集有 m 条样本数据,每次从这 m 条数据中随机取一条数据放入采样集,然后将其返回,让下一次采样有机会仍然能被采样。然后重复 m 次,就能得到拥有 m 条数据的采样集,该采样集作为 Bagging 的众多分类器中的一个作为训练数据集。假设有 T 个分类器(随便什么分类器),那么就重复 T 此随机有放回采样,构建出 T 个采样集分别作为 T 个分类器的训练数据集。
并行: 假设有 10 个分类器,在 Boosting 中,1 号分类器训练完成之后才能开始 2 号分类器的训练,而在 Bagging 中,分类器可以同时进行训练,当所有分类器训练完成之后,整个 Bagging 的训练过程就结束了。
samples = np.random.choice(n, n, replace=True)从0到n-1选取n个有放回采样,
prediction=[model.predict(feature) for model in self.models]
votes=[prediction[j][i] for j in range(self.n_model)]
max(set(votes),key=votes.count)以votes.count为排序依据,对set(votes)进行排序并取最大值
import numpy as np
from sklearn.tree import DecisionTreeClassifier
class BaggingClassifier():
def __init__(self, n_model=10):
'''
初始化函数,设置模型参数
:param n_model: 分类器数量,默认为10个决策树
'''
# 分类器的数量,默认为10
self.n_model = n_model
# 用于保存训练后的模型,存储每个决策树
self.models = []
def fit(self, feature, label):
# 获取样本数量
n = len(label)
# 训练 n_model 个决策树
for i in range(self.n_model):
# 有放回地随机采样样本索引
samples = np.random.choice(n, n, replace=True)
# 生成样本的特征和标签子集
sample_f = feature[samples]
sample_l = label[samples]
# 使用决策树模型进行训练,最大深度为3
model = DecisionTreeClassifier(max_depth=3)
model.fit(sample_f, sample_l)
# 将训练好的模型添加到模型列表中
self.models.append(model)
def predict(self, feature):
'''
对测试集数据进行预测,采用投票机制
:param feature: 测试集数据,类型为ndarray,形状为 (n_samples, n_features)
:return: 预测结果,类型为ndarray,形状为 (n_samples,)
'''
# 存储每个模型的预测结果
prediction=[]
for model in self.models:
prediction.append(model.predict(feature))
# prediction=[model.predict(feature) for model in self.models]
final_prediction=[]
for i in range(len(feature)):
votes=[prediction[j][i] for j in range(self.n_model)]
l=max(set(votes),key=votes.count)
final_prediction.append(l)
return np.array(final_prediction)
#************* End **************#
随机森林
随机森林是 Bagging 的一种扩展变体,随机森林的训练过程相对与 Bagging 的训练过程的改变有:
基学习器: Bagging 的基学习器可以是任意学习器,而随机森林则是以决策树作为基学习器。
随机属性选择: 假设原始训练数据集有 10 个特征,从这 10 个特征中随机选取 k 个特征构成训练数据子集,然后将这个子集作为训练集扔给决策树去训练。其中 k 的取值一般为 log2(特征数量) 。
这样的改动通常会使得随机森林具有更加强的泛化性,因为每一棵决策树的训练数据集是随机的,而且训练数据集中的特征也是随机抽取的。如果每一棵决策树模型的差异比较大,那么就很容易能够解决决策树容易过拟合的问题。
随机森林的预测流程与 Bagging 的预测流程基本一致,如果是回归,就将结果基学习器的预测结果全部加起来算平均;如果是分类,就投票,票数最多的结果作为最终结果。但需要注意的是,在预测时所用到的特征必须与训练模型时所用到的特征保持一致。
s = np.random.choice(l, self.feature_nums, replace=False)随机选择不重复的特征
sub_sample = sample_f[:, s]在s列的所有行数据
votes.append(model.predict([sub_f])[0]) # 获取预测结果
import numpy as np
from collections import Counter
from sklearn.tree import DecisionTreeClassifier
class RandomForestClassifier():
def __init__(self, n_model=10):
'''
初始化函数
'''
self.n_model = n_model
self.feature_nums = None
self.models = []
self.col_indexs = []
def fit(self, feature, label):
'''
训练模型
:param feature: 训练集数据,类型为ndarray
:param label: 训练集标签,类型为ndarray
:return: None
'''
n, l = feature.shape
if self.feature_nums is None:
self.feature_nums = int(np.log2(l)) # 取整以确保feature_nums是整数
for i in range(self.n_model):
# 有放回采样
sample = np.random.choice(n, n, replace=True)
sample_f = feature[sample]
sample_l = label[sample]
# 随机选择特征列
s = np.random.choice(l, self.feature_nums, replace=False)
self.col_indexs.append(s)
sub_sample = sample_f[:, s]
model = DecisionTreeClassifier(max_depth=3)
model.fit(sub_sample, sample_l)
self.models.append(model)
def predict(self, feature):
'''
:param feature: 测试集数据,类型为ndarray
:return: 预测结果,类型为ndarray
'''
predictions = []
for j in range(feature.shape[0]): # 遍历每个测试样本
votes = []
for i, model in enumerate(self.models): # 遍历每棵决策树
col = self.col_indexs[i] # 获取模型训练时使用的特征列
sub_f = feature[j, col] # 获取测试样本的特征
votes.append(model.predict([sub_f])[0]) # 获取预测结果
# 投票机制,选择出现次数最多的结果
predictions.append(max(set(votes), key=votes.count))
return np.array(predictions)
聚类
层次聚类距离计算:
dist = np.linalg.norm(i - j) #直接计算i,j的欧氏距离
return np.min(dist) #np.argmin(dist)返回索引
import numpy as np
def calc_min_dist(cluster1, cluster2):
'''
计算簇间最小距离
:param cluster1:簇1中的样本数据,类型为ndarray
:param cluster2:簇2中的样本数据,类型为ndarray
:return:簇1与簇2之间的最小距离
'''
min_dist = float('inf') # 初始化最小距离为正无穷大
for i in cluster1:
for j in cluster2:
dist = np.linalg.norm(i - j) # 计算欧几里得距离
if dist < min_dist:
min_dist = dist
return min_dist
def calc_max_dist(cluster1, cluster2):
'''
计算簇间最大距离
:param cluster1:簇1中的样本数据,类型为ndarray
:param cluster2:簇2中的样本数据,类型为ndarray
:return:簇1与簇2之间的最大距离
'''
max_dist = -float('inf') # 初始化最大距离为负无穷大
for i in cluster1:
for j in cluster2:
dist = np.linalg.norm(i - j) # 计算欧几里得距离
if dist > max_dist:
max_dist = dist
return max_dist
def calc_avg_dist(cluster1, cluster2):
'''
计算簇间平均距离
:param cluster1:簇1中的样本数据,类型为ndarray
:param cluster2:簇2中的样本数据,类型为ndarray
:return:簇1与簇2之间的平均距离
'''
total_dist = 0
count1 = 0
count2 = 0
for i in cluster1:
for j in cluster2:
total_dist += np.linalg.norm(i - j) # 计算欧几里得距离
return total_dist / (len(cluster1)*len(cluster2)) # 返回平均距离k-means
距离度量
曼哈顿距离即每个维度距离求和,欧氏距离即空间直线距离
def distance(x,y,p=2):
'''
input:x(ndarray):第一个样本的坐标
y(ndarray):第二个样本的坐标
p(int):等于1时为曼哈顿距离,等于2时为欧氏距离
output:distance(float):x到y的距离
'''
if(p==1):
return sum(np.abs(x-y))
else:
return np.sqrt(sum((x-y)**2))质心计算
dist=np.power(np.sum(np.abs(x-y)**p),1/p)
Cmass=np.mean(data,axis=0);
dist_list=sorted(dist)
#encoding=utf8
import numpy as np
#计算样本间距离
def distance(x, y, p=2):
#********* Begin *********#
# 计算x和y之间差的绝对值的p次方
dist=np.power(np.sum(np.abs(x-y)**p),1/p)
# 计算最终的距离值
#********* End *********#
return dist
#计算质心
def cal_Cmass(data):
'''
input:data(ndarray):数据样本
output:mass(ndarray):数据样本质心
'''
#********* Begin *********#
# 计算数据样本的质心(即每个维度的平均值)
Cmass=np.mean(data,axis=0)
#********* End *********#
return Cmass
#计算每个样本到质心的距离,并按照从小到大的顺序排列
def sorted_list(data,Cmass):
'''
input:data(ndarray):数据样本
Cmass(ndarray):数据样本质心
output:dis_list(list):排好序的样本到质心距离
'''
#********* Begin *********#
# 初始化一个空列表,用于存储距离
dist=[]
# 遍历数据样本中的每个样本
for sample in data:
dis=distance(Cmass,sample)
dist.append(dis)
# 计算当前样本到质心的距离,并添加到列表中
# 对距离列表进行排序
dist_list=sorted(dist)
return dist_list
#********* End *********#
k-means
model = KMeans(n_clusters=k, init='k-means++', max_iter=500, tol=1e-4, random_state=42)
K-means 是一种 无监督学习 方法,它确实没有使用真实标签(ground truth labels),但仍然会为每个样本分配一个 聚类标签(cluster index),这个标签是算法自动生成的,表示样本属于哪个簇(cluster)
初始化聚类中心
- 随机选择
k个样本作为初始聚类中心centroids。
- 随机选择
迭代优化(直到收敛或达到最大迭代次数):
步骤 1:分配样本到最近的簇
对每个样本
x ∈ X,计算它与所有centroids的距离,并分配到最近的簇。代码实现:
create_clusters(centroids, X)。
步骤 2:更新聚类中心
对每个簇,计算其所有样本的均值,作为新的聚类中心。
代码实现:
update_centroids(clusters)。
步骤 3:检查收敛
如果新旧聚类中心的距离变化
<= ε(varepsilon),则停止迭代。否则,继续迭代。
返回聚类标签
- 最终,为每个样本分配其最近的聚类中心的索引,作为聚类标签
labels。
- 最终,为每个样本分配其最近的聚类中心的索引,作为聚类标签
labels = np.zeros(X.shape[0], dtype=int)
return np.argmin(distance)
clusters=[[] for _ in range(self.k)]
new_centroids[i] = np.mean(clusters[i], axis=0)
centroid_shift = np.linalg.norm(new_centroids - centroids)
#NumPy 提供的一个线性代数函数,用来计算矩阵的“范数”,在这里是计算 向量的欧几里得距离
sample=np.random.choice(len(X),self.k,replace=False)
#encoding=utf8
import numpy as np
# 计算一个样本与数据集中所有样本的欧氏距离的平方
def euclidean_distance(one_sample, X):
return np.sum((X - one_sample) ** 2, axis=1)
class Kmeans():
"""Kmeans聚类算法.
Parameters:
-----------
k: int
聚类的数目.
max_iterations: int
最大迭代次数.
varepsilon: float
判断是否收敛, 如果上一次的所有k个聚类中心与本次的所有k个聚类中心的差都小于varepsilon,
则说明算法已经收敛
"""
def __init__(self, k=2, max_iterations=500, varepsilon=0.0001):
self.k = k
self.max_iterations = max_iterations
self.varepsilon = varepsilon
np.random.seed(1)
#********* Begin *********#
# 从所有样本中随机选取self.k样本作为初始的聚类中心
def init_random_centroids(self, X):
sample=np.random.choice(len(X),self.k,replace=False)
return X[sample]
# 返回距离该样本最近的一个中心索引[0, self.k)
def _closest_centroid(self, sample, centroids):
distance=euclidean_distance(sample,centroids)
return np.argmin(distance)
# 将所有样本进行归类,归类规则就是将该样本归类到与其最近的中心
def create_clusters(self, centroids, X):
clusters=[[] for _ in range(self.k)]
for sample in X:
closest_idx=self._closest_centroid(sample,centroids)
clusters[closest_idx].append(sample)
return clusters
# 对中心进行更新
def update_centroids(self, clusters, X):
new_centroids = np.zeros((self.k, len(clusters[0][0])))
for i in range(self.k):
# 对每个簇内样本求均值
new_centroids[i] = np.mean(clusters[i], axis=0)
return new_centroids
# 对整个数据集X进行Kmeans聚类,返回其聚类的标签
def predict(self, X):
# 从所有样本中随机选取self.k样本作为初始的聚类中心
centroids=self.init_random_centroids(X)
# 迭代,直到算法收敛(上一次的聚类中心和这一次的聚类中心几乎重合)或者达到最大迭代次数
for i in range(self.max_iterations):
clusters=self.create_clusters(centroids,X)
new_centroids=self.update_centroids(clusters,X)
centroid_shift = np.linalg.norm(new_centroids - centroids)
if centroid_shift <= self.varepsilon:
break
# 更新聚类中心
centroids = new_centroids
# 如果聚类中心几乎没有变化,说明算法已经收敛,退出迭代
labels = np.zeros(X.shape[0], dtype=int)
for i, sample in enumerate(X):
labels[i] = self._closest_centroid(sample, centroids)
return labels
DBSCAN
簇(Cluster) = 高密度区域(数据点密集)。
噪声(Noise) = 低密度区域(数据点稀疏)。
eps(ε):邻域半径,用于判断两个点是否“相邻”。min_samples:形成一个簇所需的最小样本数(核心点的邻域至少要有这么多点)。
| 类型 | 定义 | 示例 |
|---|---|---|
| 核心点(Core Point) | 在 eps 邻域内至少有 min_samples 个点(包括自己) |
若 min_samples=5,某点周围有 ≥5 个点(含自己),则它是核心点 |
| 边界点(Border Point) | 在某个核心点的 eps 邻域内,但自身不满足核心点条件 |
周围点 < min_samples,但属于某个核心点的邻域 |
| 噪声点(Noise Point) | 既不是核心点,也不是边界点 | 离群点,不属于任何簇 |
如果点
q在点p的eps邻域内,且p是核心点,则称q从p密度直达。如果存在一个核心点序列
p1, p2, ..., pn,使得pi+1从pi密度直达,则称p1和pn密度相连。
随机选择一个未访问的点
p。检查
p的eps邻域:如果
p是核心点(邻域内点数 ≥min_samples):创建一个新簇。
递归地找出所有从
p密度可达的点,加入该簇。
如果
p是噪声点,标记为噪声。
重复上述过程,直到所有点被访问。
不需要预先指定簇数量(k)(比 K-means 更灵活)。
能发现任意形状的簇(K-means 只能发现球形簇)。
能识别噪声点(适合处理离群值)。
对参数
eps和min_samples敏感,需要调参。| 特性 | DBSCAN | K-means |
| —————— | ——————————- | ———- |
| 簇形状 | 任意形状 | 球形 |
| 噪声处理 | 能识别噪声 | 不能 |
| 需指定簇数(k) | 不需要 | 需要 |
| 参数依赖 |eps和min_samples|k|
| 适合场景 | 非凸簇、噪声多 | 凸簇、数据均匀 |neighbors += new_neighbors # 将新邻域的点加入待处理列表fit_predict()是一个结合了训练和预测的简化语法,通常在 聚类 或 无监督学习 中使用,它的作用是:首先对数据进行训练(拟合模型),然后直接对数据进行预测,返回聚类标签或者分类标签。这种方法可以简化代码并提高效率,尤其是在进行无监督学习时
#encoding=utf8
import numpy as np
import random
# 寻找eps邻域内的点
def findNeighbor(j, X, eps):
"""
计算样本X[j]的eps邻域,返回所有在该邻域内的点的索引
input:
j (int): 当前点的索引
X (ndarray): 样本数据
eps (float): 邻域半径
output:
N (list): 邻域内的点的索引
"""
N = [] # 存放邻域内的点
for p in range(X.shape[0]): # 遍历所有点
# 计算欧式距离
temp = np.sqrt(np.sum(np.square(X[j] - X[p])))
if temp <= eps: # 如果点p在eps半径范围内
N.append(p) # 将该点加入邻域列表
return N
def expandCluster(X, labels, point, neighbors, cluster_id, eps, min_Pts):
"""
扩展簇,将密度可达的点加入到当前簇
input:
X (ndarray): 样本数据
labels (list): 当前的聚类标签
point (int): 当前扩展的核心点的索引
neighbors (list): 核心点的邻域
cluster_id (int): 当前簇的ID
eps (float): 邻域半径
min_Pts (int): 最小邻域内点数
"""
labels[point] = cluster_id # 将当前点标记为当前簇的成员
i = 0
while i < len(neighbors): # 遍历邻域中的每一个点
neighbor_point = neighbors[i]
# 如果邻居点是噪声(未分类),将其标记为当前簇的一部分
if labels[neighbor_point] == -1:
labels[neighbor_point] = cluster_id
# 如果邻居点没有被标记,且它是一个核心点,则继续扩展簇
elif labels[neighbor_point] == 0:
labels[neighbor_point] = cluster_id
new_neighbors = findNeighbor(neighbor_point, X, eps)
if len(new_neighbors) >= min_Pts: # 如果该点是核心点
neighbors += new_neighbors # 将新邻域的点加入待处理列表
i += 1
# DBSCAN算法
def dbscan(X, eps, min_Pts):
'''
输入:
X (ndarray): 样本数据
eps (float): eps邻域半径
min_Pts (int): eps邻域内最少点个数
输出:
labels (list): 聚类结果,每个点的标签(-1表示噪声,其他数字表示簇编号)
'''
# 样本数量
nums = len(X)
labels = np.zeros(nums) # 初始化所有点的标签为0(表示未处理)
cluster_id = 0 # 聚类编号初始化为0
# 遍历每个样本点
for i in range(nums):
if labels[i] != 0: # 如果该点已经被处理过,跳过
continue
else:
# 获取点i的邻域
neighbors = findNeighbor(i, X, eps)
if len(neighbors) < min_Pts: # 如果邻域内的点数小于min_Pts,标记为噪声
labels[i] = -1
else: # 如果是核心点,则扩展簇
cluster_id += 1 # 创建一个新的簇
labels[i] = cluster_id # 将当前点标记为该簇
expandCluster(X, labels, i, neighbors, cluster_id, eps, min_Pts)
return labels # 返回聚类结果
AGNES
自底向上的不断合并簇直到簇数量满足要求
clusters[cova] += clusters[covb] 合并簇
del clusters[covb] # 删除第二个簇
import numpy as np
def AGNES(feature, k):
'''
AGNES聚类并返回聚类结果,量化距离时请使用簇间最大欧氏距离
假设数据集为`[1, 2], [10, 11], [1, 3]],那么聚类结果可能为`[[1, 2], [1, 3]], [[10, 11]]]
:param feature:数据集,类型为ndarray
:param k:表示想要将数据聚成`k`类,类型为`int`
:return:聚类结果,类型为list
'''
#********* Begin *********#
clusters=[[feature[i]] for i in range(len(feature))]
cluster_nums=len(clusters)
while cluster_nums > k:
dist_min = 1e9
cova, covb = -1, -1
# 寻找距离最小的簇对
for idx1 in range(cluster_nums):
for idx2 in range(idx1 + 1, cluster_nums):
# 计算两个簇之间的最小欧氏距离
dist = []
for i in clusters[idx1]:
for j in clusters[idx2]:
dist.append(np.linalg.norm(i - j))
curr_max = np.min(dist) # 选择最小欧氏距离
if curr_min < dist_min:
dist_min = curr_max
cova, covb = idx1, idx2
# 合并最小距离的两个簇
clusters[cova] += clusters[covb]
del clusters[covb] # 删除第二个簇
# 更新簇的数量
cluster_nums -= 1
#********* End *********#
EM算法
单次迭代
np.sum(np.abs(np.array(new_thetas)-np.array(thetas))
import numpy as np
def em_single(init_values, observations):
pa, pb = init_values
a_heads = 0
a_tails = 0
b_heads = 0
b_tails = 0
for trial in observations:
num_heads = sum(trial)
num_tails = len(trial) - num_heads
log_ka = np.sum([np.log(pa if coin == 1 else 1 - pa) for coin in trial])
log_kb = np.sum([np.log(pb if coin == 1 else 1 - pb) for coin in trial])
# Convert log-probabilities to probabilities safely
max_log = max(log_ka, log_kb)
exp_ka = np.exp(log_ka - max_log)
exp_kb = np.exp(log_kb - max_log)
total = exp_ka + exp_kb
softa = exp_ka / total
softb = exp_kb / total
a_heads += softa * num_heads
a_tails += softa * num_tails
b_heads += softb * num_heads
b_tails += softb * num_tails
return [a_heads / (a_heads + a_tails), b_heads / (b_heads + b_tails)]
def em(observations, thetas, tol=1e-4, iterations=100):
"""
模拟抛掷硬币实验并使用EM算法估计硬币A与硬币B正面朝上的概率。
:param observations: 抛掷硬币的实验结果记录,类型为list。
:param thetas: 硬币A与硬币B正面朝上的概率的初始值,类型为list,如[0.2, 0.7]代表硬币A正面朝上的概率为0.2,硬币B正面朝上的概率为0.7。
:param tol: 差异容忍度,即当EM算法估计出来的参数theta不怎么变化时,可以提前挑出循环。例如容忍度为1e-4,则表示若这次迭代的估计结果与上一次迭代的估计结果之间的L1距离小于1e-4则跳出循环。为了正确的评测,请不要修改该值。
:param iterations: EM算法的最大迭代次数。为了正确的评测,请不要修改该值。
:return: 将估计出来的硬币A和硬币B正面朝上的概率组成list或者ndarray返回。如[0.4, 0.6]表示你认为硬币A正面朝上的概率为0.4,硬币B正面朝上的概率为0.6。
"""
#********* Begin *********#
new_thetas=0
for i in range(iterations):
new_thetas=em_single(thetas,observations)
if(np.sum(np.abs(np.array(new_thetas)-np.array(thetas)))<tol):
break
thetas=new_thetas
return new_thetas
#********* End *********#性能指标
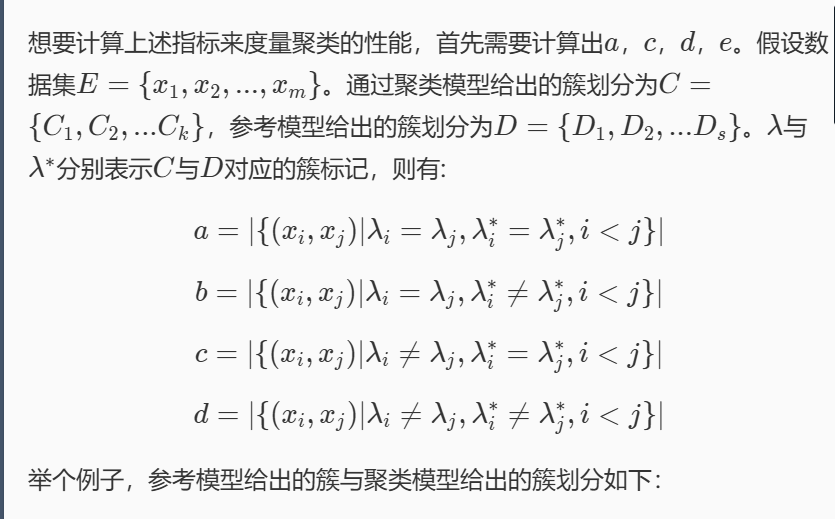
外部指标
if y_true[i] == y_true[j] and y_pred[i] == y_pre #求与操作用and,&是位运算
a+=1
def calc(y_true, y_pred):
a = b = c = d = 0
for i in range(len(y_true)):
for j in range(i + 1, len(y_pred)):
if y_true[i] == y_true[j] and y_pred[i] == y_pred[j]:
a += 1
elif y_true[i] == y_true[j] and y_pred[i] != y_pred[j]:
b += 1
elif y_true[i] != y_true[j] and y_pred[i] == y_pred[j]:
c += 1
else:
d += 1
return [a, b, c, d]
def calc_JC(y_true, y_pred):
ex = calc(y_true, y_pred)
return ex[0] / (ex[0] + ex[1] + ex[2]) if (ex[0] + ex[1] + ex[2]) != 0 else 0.0
def calc_FM(y_true, y_pred):
ex = calc(y_true, y_pred)
if (ex[0] + ex[1]) == 0 or (ex[0] + ex[2]) == 0:
return 0.0
return np.sqrt((ex[0] / (ex[0] + ex[1])) * (ex[0] / (ex[0] + ex[2])))
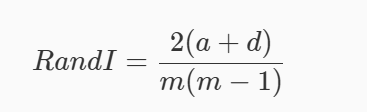
def calc_Rand(y_true, y_pred):
m = len(y_true)
ex = calc(y_true, y_pred)
return 2 * (ex[0] + ex[3]) / (m * (m - 1)) if m > 1 else 0.0
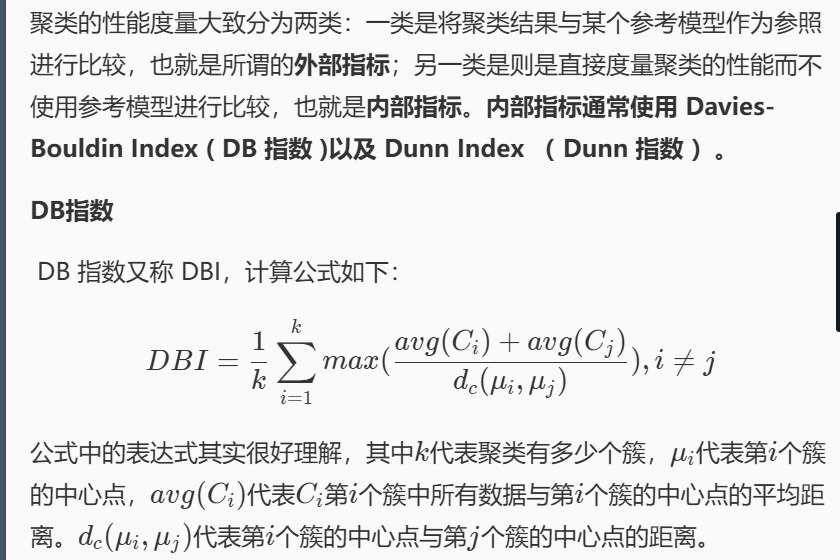
内部指标
DB 指数越小就越就意味着簇内距离越小同时簇间距离越大,也就是说DB 指数越小越好
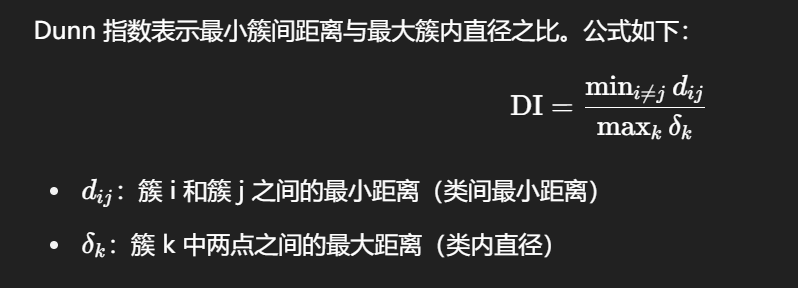
Dunn 指数越大意味着簇内距离越小同时簇间距离越大,也就是说 Dunn 指数 越大越好
np.array,arr.tolist
import numpy as np
a = [1, 2, 3]
arr = np.array(a)
arr = np.array([1, 2, 3])
a = arr.tolist()centroids = np.array([np.mean(feature[pred == label], axis=0) for label in labels])
import numpy as np
def calc_DBI(feature, pred):
labels = np.unique(pred)
k = len(labels)
centroids = np.array([np.mean(feature[pred == label], axis=0) for label in labels])
# 计算每个簇的类内平均距离(紧密度)
s = []
for label in labels:
cluster_points = feature[pred == label]
centroid = np.mean(cluster_points, axis=0)
distances = np.sqrt(np.sum((cluster_points - centroid) ** 2, axis=1))
s.append(np.mean(distances))
s = np.array(s)
# 计算簇质心间的距离矩阵
M = np.zeros((k, k))
for i in range(k):
for j in range(k):
if i != j:
M[i][j] = np.linalg.norm(centroids[i] - centroids[j])
# DBI 计算
dbi = 0
for i in range(k):
max_r = -np.inf
for j in range(k):
if i != j:
r = (s[i] + s[j]) / M[i][j]
if r > max_r:
max_r = r
dbi += max_r
return dbi / k
for label in labels:
feat=feature[pred==label]
center=np.mean(feat,axis=0)
dist=[]
for i in feat:
dist.append(np.linalg.norm(i-center))
s.append(np.mean(dist))
#s[i]为簇内平均距离
maxsum=0
for i in range(k):
max1=0
for j in range(k):
if(i!=j):
max1=max((s[i]+s[j])/np.linalg.norm(centroids[i]-centroids[j]),max1)
maxsum+=max1
return maxsum/k
#********* End *********#
def calc_DI(feature, pred):
labels = np.unique(pred)
k = len(labels)
# 计算每个簇的最大内部距离
max_intra = 0
for label in labels:
points = feature[pred == label]
for i in range(len(points)):
for j in range(i + 1, len(points)):
dist = np.linalg.norm(points[i] - points[j])
if dist > max_intra:
max_intra = dist
# 计算簇间最小距离
min_inter = np.inf
for i in range(k):
for j in range(i + 1, k):
points_i = feature[pred == labels[i]]
points_j = feature[pred == labels[j]]
for p in points_i:
for q in points_j:
dist = np.linalg.norm(p - q)
if dist < min_inter:
min_inter = dist
return min_inter / max_intra if max_intra != 0 else 0降维
维数灾难通常是指对于已知样本数目,存在一个特征数目的最大值,当实际使用的特征数目超过这个最大值时,机器学习算法的性能不是得到改善,而是退化(过拟合)。
降低机器学习算法的时间复杂度;
节省了提取不必要特征的开销;
缓解因为维数灾难所造成的过拟合现象。
PCA主成分分析
PCA 是将数据从原来的坐标系转换到新的坐标系,新的坐标系的选择是由数据本身决定的。
第一个新坐标轴选择的是原始数据中方差最大的方向,第二个新坐标轴的选择和第一个坐标轴正交且方差最大的方向。然后该过程一直重复,重复次数为原始数据中的特征数量。最后会发现大部分方差都包含在最前面几个新坐标轴中,因此可以忽略剩下的坐标轴,从而达到降维的目的。
PCA 在降维时,需要指定将维度降至多少维,假设降至 k 维,则 PCA 的算法流程如下:
demean;
计算数据的协方差矩阵;
计算协方差矩阵的特征值与特征向量;
按照特征值,将特征向量从大到小进行排序;
选取前 k 个特征向量作为转换矩阵;
demean 后的数据与转换矩阵做矩阵乘法获得降维后的数据
matrix=np.cov(data.T) #cov函数期望行代表特征
val, vec = np.linalg.eigh(mat) #计算特征值和特征向量
indices = np.argsort(val)[::-1] # 倒序排序,val越大越重要
vec_res = vec_sort[:,:k]
import numpy as np
def pca(data, k):
'''
对data进行PCA,并将结果返回
:param data: 数据集,类型为ndarray
:param k: 想要降成几维,类型为int
:return: 降维后的数据,类型为ndarray
'''
#********* Begin *********#
# 均值归一化
me = np.mean(data, axis=0)
data = data - me
# 计算协方差矩阵
# after_demean的行数为样本个数,列数为特征个数
# 由于cov函数的输入希望是行代表特征,列代表数据的矩阵,所以要转置
mat = np.cov(data.T)
# 计算特征值和特征向量
val, vec = np.linalg.eigh(mat)
# 按特征值从大到小排序,选择前k个特征向量
indices = np.argsort(val)[::-1] # 倒序排序,val越大越重要
vec_sort = vec[:, indices] # 按排序后的索引选择特征向量
# 选择前k个主成分
vec_res = vec_sort[:, [i for i in range(k)]] # 取前k列
# 返回降维后的数据
return data.dot(vec_res)
#********* End *********#
MDS多维缩放
MDS 算法认为,在数据样本中,每个样本的每个特征值并不是数据间关系的必要特征,真正的基础特征是每个点与数据集中其他点的距离。
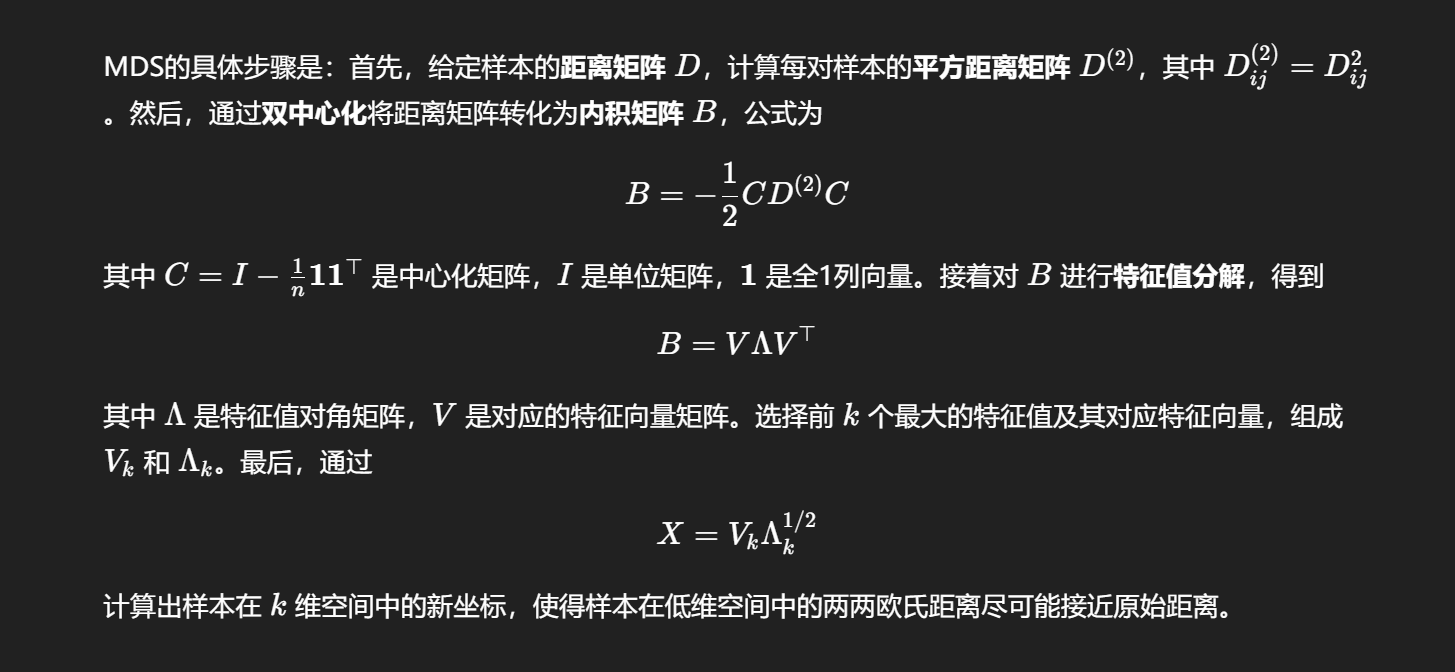
H = np.eye(n_samples) - np.ones((n_samples, n_samples)) / n_samples #单位阵减去1/n全一矩阵
B = -0.5 * np.dot(H, np.dot(distance_matrix ** 2, H))
eigvals_k = np.diag(np.sqrt(eigvals_sorted[:k])) #取前 k 个排序好的特征值,先开平方,然后把它们放到一个对角矩阵中
import numpy as np
def euclidean_distance(x, y):
"""计算欧几里得距离"""
return np.sqrt(np.sum((x - y) ** 2))
def compute_distance_matrix(data):
"""计算距离矩阵"""
n_samples = data.shape[0]
distance_matrix = np.zeros((n_samples, n_samples))
for i in range(n_samples):
for j in range(n_samples):
distance_matrix[i, j] = euclidean_distance(data[i], data[j])
return distance_matrix
def mds(data, k):
"""
手动实现MDS降维
:param data: 原始数据 (样本,特征) 形式的 numpy 数组
:param k: 目标降维的维度,默认2
:return: 降维后的数据
"""
# 1. 计算距离矩阵
distance_matrix = compute_distance_matrix(data)
# 2. 中心化距离矩阵
n_samples = distance_matrix.shape[0]
H = np.eye(n_samples) - np.ones((n_samples, n_samples)) / n_samples
B = -0.5 * np.dot(H, np.dot(distance_matrix ** 2, H))
# 3. 特征值分解
eigvals, eigvecs = np.linalg.eigh(B)
# 4. 按照特征值从大到小排序
sorted_indices = np.argsort(eigvals)[::-1] # 降序排列
eigvals_sorted = eigvals[sorted_indices]
eigvecs_sorted = eigvecs[:, sorted_indices]
# 5. 选择前k个特征值和特征向量
eigvals_k = np.diag(np.sqrt(eigvals_sorted[:k]))
eigvecs_k = eigvecs_sorted[:, :k]
# 6. 计算低维坐标
low_dim_data = np.dot(eigvecs_k, eigvals_k)
return low_dim_data # 返回转置后的低维数据
# -*- coding: utf-8 -*-
from sklearn.manifold import MDS
def mds(data,d):
'''
input:data(ndarray):待降维数据
d(int):降维后数据维度
output:Z(ndarray):降维后数据
'''
#********* Begin *********#
model=MDS(n_components=d)
#n_components :即我们进行 MDS 降维时降到的维数。在降维时需要输入这个参数。
Z=model.fit_transform(data)
#********* End *********#
return Z
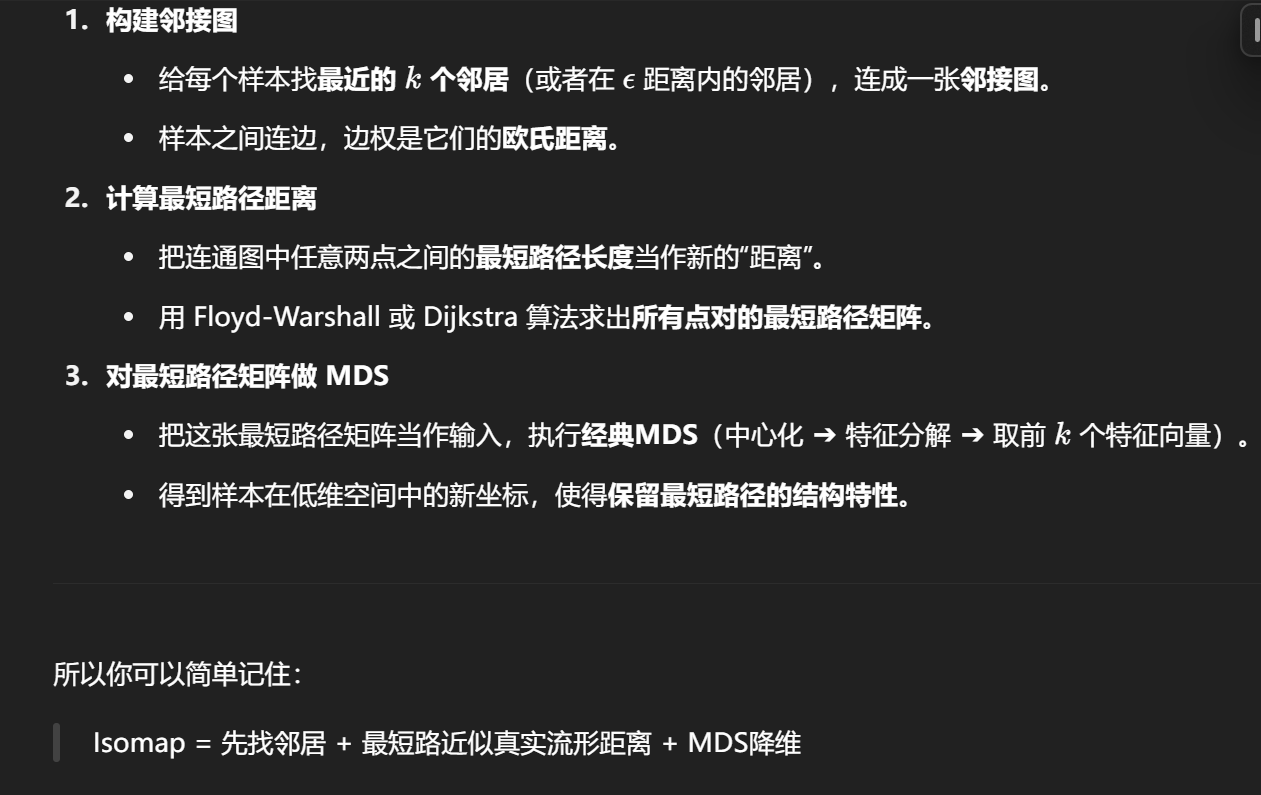
Isomap等度量映射
Isomap 算法可以看作是 “在局部保持邻居关系的基础上,再用 MDS 降维”
Z = V @ L #特征向量组成的矩阵在左边,乘特征值构成的的对角阵
model = Isomap(n_components=d,n_neighbors=k) 取k个相邻数据,降到d维
# -*- coding: utf-8 -*-
import numpy as np
def isomap(data, d, k, Max=1e9):
'''
input:
data(ndarray): 待降维数据,shape=(n_samples, n_features)
d(int): 降维后数据维数
k(int): 最近的k个样本
Max(float): 表示无穷大
output:
Z(ndarray): 降维后的数据,shape=(n_samples, d)
'''
n = data.shape[0]
# Step 1: 计算欧氏距离矩阵
dist_matrix = np.zeros((n, n))
for i in range(n):
for j in range(i + 1, n):
dist = np.linalg.norm(data[i] - data[j])
dist_matrix[i][j] = dist_matrix[j][i] = dist
# Step 2: 构建 k-近邻图(非邻接的点设为 Max)
graph = np.full((n, n), Max)
for i in range(n):
neighbors = np.argsort(dist_matrix[i])[1:k+1] # 取前k个最近邻(排除自身)
for j in neighbors:
graph[i][j] = dist_matrix[i][j]
graph[j][i] = dist_matrix[i][j] # 保持对称
# Step 3: 使用 Floyd-Warshall 算法求最短路径(近似测地线)
for k_mid in range(n):
for i in range(n):
for j in range(n):
if graph[i][j] > graph[i][k_mid] + graph[k_mid][j]:
graph[i][j] = graph[i][k_mid] + graph[k_mid][j]
# Step 4: 多维尺度分析 (MDS)
D = graph
D_squared = D ** 2
H = np.eye(n) - np.ones((n, n)) / n
B = -0.5 * H @ D_squared @ H
# Step 5: 特征值分解
eigvals, eigvecs = np.linalg.eigh(B)
idx = np.argsort(eigvals)[::-1]
eigvals = eigvals[idx]
eigvecs = eigvecs[:, idx]
# Step 6: 计算嵌入坐标 Z
L = np.diag(np.sqrt(eigvals[:d]))
V = eigvecs[:, :d]
Z = V @ L
return Z
# -*- coding: utf-8 -*-
from sklearn.manifold import Isomap
def isomap(data,d,k):
'''
input:data(ndarray):待降维数据
d(int):降维后数据维度
k(int):最近的k个样本
output:Z(ndarray):降维后数据
'''
#********* Begin *********#
model = Isomap(n_components=d,n_neighbors=k)
Z=model.fit_transform(data)
#********* End *********#
return Z
LLE局部线性嵌入

Z = data[N_i] - data[i] # shape: (k, m)
C = Z.dot(Z.T) # 计算邻居之间差异的协方差矩阵 C,形状是 (k, k)
C += np.eye(k) * 1e-3 # 为了数值稳定,给协方差矩阵 C 加上一个小的正则项(0.001)
w = np.linalg.solve(C, ones) # 解线性方程组,得到每个邻居的权重
W[i, N_i[j]] = w[j] # 将第 j 个邻居的权重填入相应位置
M = (I - W).T.dot(I - W) # 计算矩阵 M,形式为 (I - W)^T * (I - W)
Z = eigvecs[:, idx[1:d+1]] # 选取最小的 d 个特征值对应的特征向量(跳过第一个全1特征向量)
# encoding=utf8
import numpy as np
# 计算数据集的欧氏距离矩阵
def calc_dist(data):
n = data.shape[0] # 获取样本数目
dist_matrix = np.zeros((n, n)) # 初始化一个 n x n 的距离矩阵
for i in range(n):
for j in range(n):
# 计算第 i 个样本与第 j 个样本的欧氏距离
dist_matrix[i, j] = np.linalg.norm(data[i] - data[j]) # np.linalg.norm 计算欧氏距离
return dist_matrix
# 找到每个样本的 k 个最近邻
def find_neighbors(dist_matrix, k):
n = dist_matrix.shape[0] # 获取样本数目
neighbors = np.zeros((n, k), dtype=int) # 初始化一个 n x k 的邻居矩阵
for i in range(n):
# 对于每个样本,按距离从小到大排序,找到前 k 个邻居(排除自己)
sorted_indices = np.argsort(dist_matrix[i]) # 排序,返回排序后的索引
neighbors[i] = sorted_indices[1:k+1] # 排除自己(即第一个是自己,跳过)
return neighbors
# 局部线性嵌入(LLE)算法
def lle(data, d, k):
n, m = data.shape # n: 样本数目, m: 原始特征维度
dist_matrix = calc_dist(data) # 计算数据点之间的距离矩阵
neighbors = find_neighbors(dist_matrix, k) # 找到每个样本的 k 个邻居
# 初始化权重矩阵 W,存储每个样本到其邻居的权重
W = np.zeros((n, n))
# 对于每个样本,计算其到邻居的权重
for i in range(n):
# 获取第 i 个样本的 k 个邻居的索引
N_i = neighbors[i]
# 构建邻居矩阵 Z:每列是一个邻居与 x_i 的差
Z = data[N_i] - data[i] # Z 的形状是 (k, m),即每行是一个邻居的差向量
C = Z.dot(Z.T) # 计算邻居之间差异的协方差矩阵 C,形状是 (k, k)
C += np.eye(k) * 1e-3 # 为了数值稳定,给协方差矩阵 C 加上一个小的正则项(0.001)
#在计算协方差矩阵 C = Z.dot(Z.T) 时,可能会遇到矩阵 C 变得奇异(即行列式为零),特别是当邻居之间的差异非常小或者完全相同时。这种情况下,矩阵 C 可能不可逆,导致无法进行后续的线性求解。
# 解线性方程 Cw = 1,得到权重 w
ones = np.ones(k) # 创建一个大小为 k 的全1向量
w = np.linalg.solve(C, ones) # 解线性方程组,得到每个邻居的权重
w = w / np.sum(w) # 归一化权重,使得它们的和为 1
# 将计算得到的权重 w 填入第 i 行的权重矩阵 W 中
for j in range(k):
W[i, N_i[j]] = w[j] # 将第 j 个邻居的权重填入相应位置
# 构造矩阵 M = (I - W)^T * (I - W)
I = np.eye(n) # n x n 的单位矩阵
M = (I - W).T.dot(I - W) # 计算矩阵 M,形式为 (I - W)^T * (I - W)
# 计算 M 的特征值和特征向量
eigvals, eigvecs = np.linalg.eigh(M) # eigvals: 特征值, eigvecs: 特征向量
# 选择最小的 d+1 个特征值对应的特征向量(第一个特征值是 0 对应的全1向量,跳过)
idx = np.argsort(eigvals) # 获取特征值的排序索引
Z = eigvecs[:, idx[1:d+1]] # 选取最小的 d 个特征值对应的特征向量(跳过第一个全1特征向量)
return Z # 返回降维后的数据
# -*- coding: utf-8 -*-
from sklearn.manifold import LocallyLinearEmbedding
def lle(data,d,k):
'''
input:data(ndarray):待降维数据
d(int):降维后数据维度
k(int):邻域内样本数
output:Z(ndarray):降维后数据
'''
#********* Begin *********#
model=LocallyLinearEmbedding(n_components=d,n_neighbors=k)
Z=model.fit_transform(data)
#********* End *********#
return Z

